
عام طور پر ، ریموٹ کنٹرول روبوٹ آر ایف سرکٹس کا استعمال کرتے ہیں ، جس میں کام کرنے کی حد ، محدود کنٹرول اور محدود تعدد حد کی خرابیاں ہوتی ہیں۔ ان خرابیوں کو دور کرنے کے لئے ، سیل فون چلنے والا لینڈ روور روبوٹک گاڑی استعمال ہوتی ہے۔ یہ روبوٹک کنٹرول ، مداخلت فری کنٹرولرز اور بارہ تک کنٹرولنگ سسٹم وغیرہ کے فوائد فراہم کرتا ہے۔
اگرچہ کی صلاحیتوں اور ظہور ایمبیڈڈ روبوٹکس بڑے پیمانے پر مختلف ہوتے ہیں ، تمام روبوٹ کسی نہ کسی شکل میں کسی متحرک ، مکینیکل ڈھانچے کی خصوصیات کا اشتراک کرتے ہیں۔ روبوٹ کے کنٹرول میں تین مختلف مراحل شامل ہوتے ہیں جن میں وہ تاثر ، پروسیسنگ اور عمل ہوتے ہیں۔ عام طور پر ، سینسر روبوٹ پر لگائے جاتے ہیں۔ تاثر اور پروسیسنگ آن بورڈ مائکرو قابو پانے والے کے ذریعہ کی جاتی ہے ، اور کارروائی موٹروں کا استعمال کرکے انجام دی جاتی ہے۔
سیل فون آپریٹڈ لینڈ روور روبوٹک وہیکل

ایجی فکس کٹ ڈاٹ کام کے ذریعہ سیل فون آپریٹڈ لینڈ روور روبوٹک وہیکل
اس پروجیکٹ کا بنیادی ارادہ روبوٹک بازو کو کنٹرول کرنا ہے جو موبائل فون استعمال کرکے روبوٹک گاڑی پر سوار ہے۔ یہ کام کرنے کی ایک بڑی حد اور مضبوط کنٹرول وغیرہ فراہم کرتا ہے۔
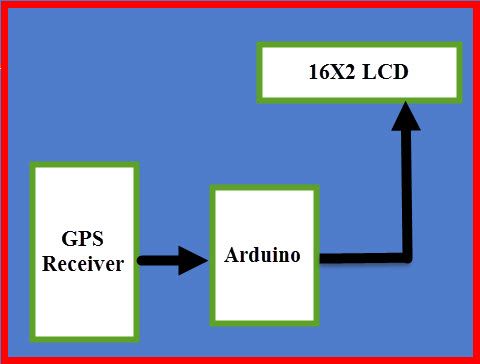
سیل فون آپریٹڈ لینڈ روور روبوٹک گاڑی کا بلاک ڈایاگرام:

سیل فون آپریٹڈ لینڈ روور کا بلاک ڈایاگرام
عمارت کے بڑے بلاکس مائکروکونٹرولر ، سیل فون ، ڈی ٹی ایم ایف کوٹواچک اور ڈی سی موٹر ڈرائیور سرکٹ ہیں۔ سیل فون پورے سسٹم کا سب سے اہم حصہ ہے کیونکہ پورا سسٹم کام کرتا ہے اور سیل فون کے ذریعہ چالو ہوتا ہے۔ ڈیٹی ایم ایف (ڈبل ٹون ملٹی فریکوینسی) سیل فون سے ان پٹ سگنل وصول کرتا ہے اور اسے ڈی کوڈ کرتا ہے ، اور پھر اس کا 4 بٹ ڈیجیٹل آؤٹ پٹ تیار کرتا ہے 8051 مائکروکانٹرولر . جب ڈیٹی ایم ایف کوٹواچک ڈیجیٹل آؤٹ پٹ دیتا ہے ، تو یہ ہر بار مداخلت بھی پیدا کرتا ہے۔
مائیکرو کنٹرولر پورے نظام کا قلب ہوتا ہے کیوں کہ یہ مکمل کنٹرولنگ عمل انجام دیتا ہے۔ مائکروکانٹرولر اس کوڈ پر منحصر ہوتا ہے جو ڈی سی ایم ایف کوٹواچک کے ذریعہ تیار کیا جاتا ہے تاکہ روور کو دائیں یا بائیں اور آگے یا پیچھے دونوں ڈی سی موٹروں کو گھوما کر منتقل کیا جاسکے۔ ڈی سی موٹر ڈرائیور مائکروکینٹرلر سے کم یا زیادہ منطق کے لحاظ سے متحرک سگنل وصول کرتا ہے ، پھر یہ دونوں موٹروں کو بڑھا دیتا ہے اور گھومتا ہے۔
روبوٹ کے کنٹرول میں بنیادی طور پر چار مختلف مراحل شامل ہیں: ادراک ، عمل کی کارروائی اور پتہ لگانا۔ تاثر کے مرحلے میں اگر روبوٹ سے منسلک سیل فون کو کال موصول ہوتی ہے ، تو سیل فون پر کلید کا دبانے والا عمل تیار شدہ ڈی ٹی ایم ایف ٹون کو ڈی کوڈ کرتا ہے۔ پھر ، ڈیکوڈر چپ سیل فون سے آڈیو سگنل وصول کرتا ہے ، اور پھر ڈیٹی ایم ایف ٹون کو بائنری کوڈ میں تبدیل کرتا ہے ، جس کے بعد مائکروکانٹرولر کو کھلایا جاتا ہے۔ اس پروجیکٹ میں ، ایک MT88710 آایسی ڈی ٹی ایم ایف کوٹواچک کے طور پر استعمال کیا جاتا ہے۔ پروسیسنگ مرحلے میں ، مائکروکانٹرلر بائنری کوڈ پر کارروائی کرتا ہے جو ڈیٹی ایم ایف کوٹواچک سے موصول ہوا ہے۔ مائکرو قابو پانے والا 'C' میں پہلے سے ترتیب دیا جاتا ہے اس خاص کام کو ان پٹ بٹس کے مطابق انجام دینے کے لئے۔
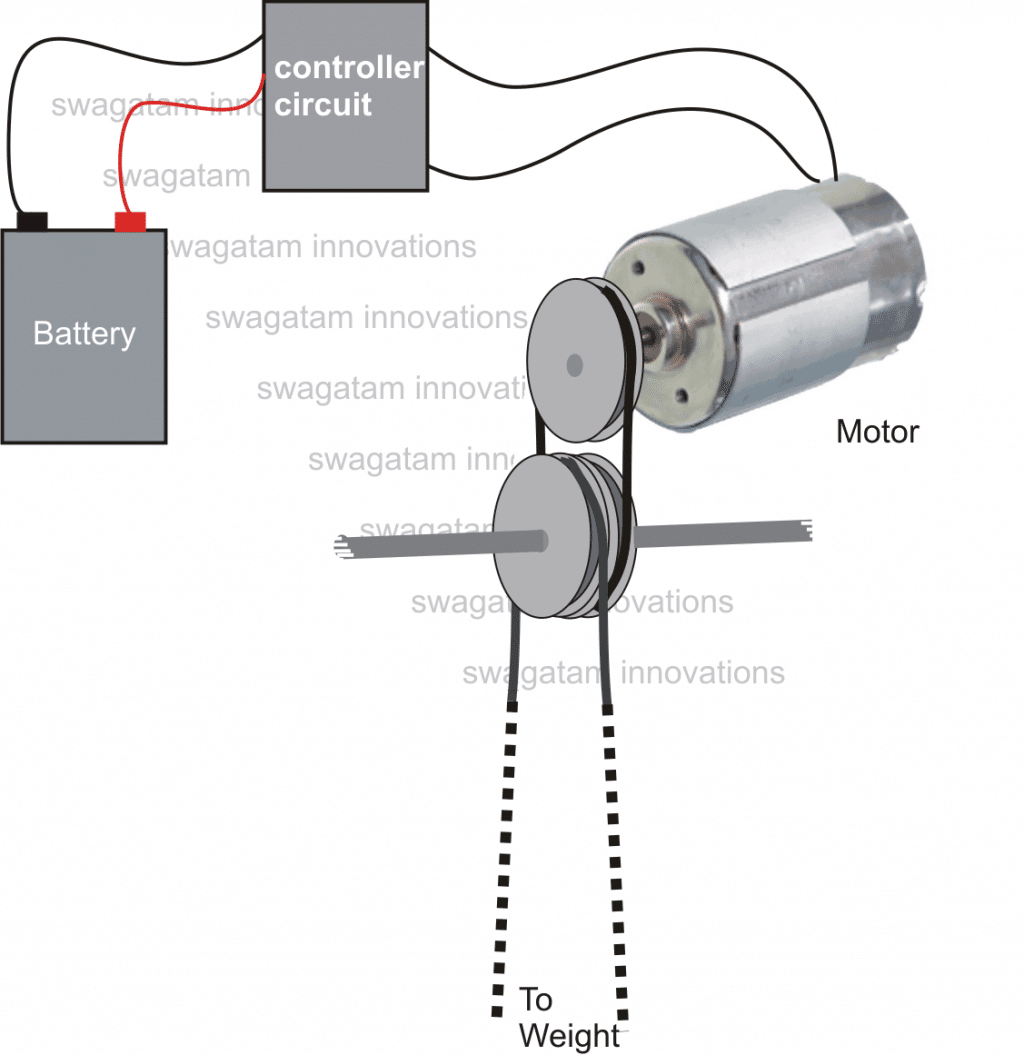
ایکشن اسٹیج پر ، موٹروں کی گردش مائکروکونٹرولر کے ذریعہ دیئے گئے ان پٹ پر منحصر ہوتی ہے۔ 30 RPM میں سے ہر ایک میں دو DC موٹریں لینڈروور کے لئے استعمال ہوتی ہیں اور موٹر ڈرائیور IC کے ذریعہ چلائی جاتی ہیں۔ اسٹیج کا پتہ لگانے پر ، اور رکاوٹوں کا پتہ لگانے کے لئے ، ایک اورکت ٹرانسمیٹر اور وصول کنندہ بوزر کے ساتھ ساتھ استعمال ہوتے ہیں۔ جب روبوٹ کے سامنے رکاوٹ آتی ہے تو ، IR ٹرانسمیٹر IR کرنوں کو اشیاء پر منتقل کرتا ہے ، پھر یہ اعتراض IR کرنوں کو IR وصول کرنے والے کی عکاسی کرتا ہے۔ اس کے بعد آئی آر وصول کنندہ بزر کو چالو کرنے کے ل the IR کرنیں وصول کرتا ہے۔
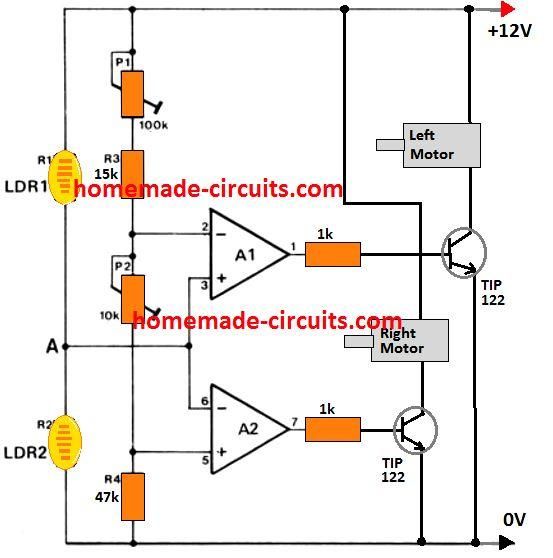
سرکٹ ڈایاگرام آف سیل فون سے چلنے والی لینڈ روور روبوٹک وہیکل:
سیل فون سے چلنے والے اس روبوٹک لینڈروور کے بنیادی اجزاء مائکروکونٹرولر ، موٹر ڈرائیور اور ڈی ٹی ایم ایف کوٹواچک ہے۔ اس پروجیکٹ میں ایک MT8870 سیریز ڈیٹی ایم ایف کوٹواچک کا استعمال کیا گیا ہے جو 16 ڈیٹی ایم ایف ٹون جوڑوں کو 4 بٹ کوڈ آؤٹ پٹ میں تلاش کرنے کے لئے ڈیجیٹل گنتی کی تکنیک استعمال کرتا ہے۔ بلٹ میں ڈائلٹون سرکٹ پریفلٹرنگ کو ختم کرتا ہے۔ اگر پن 2 پر ایک ان پٹ سگنل دیا گیا ہے ، تو پھر ان پٹ ترتیب کو موثر سمجھا جاتا ہے۔ ڈیٹی ایم ایف ٹون کا 4 بٹ ڈیکوڈ سگنل پن 14 کے آؤٹ پٹ کے ذریعہ پن 11 میں منتقل ہوتا ہے۔ یہ پنیں مائکروکانٹرولر پنوں پاؤ ، پا1 ، پا 2 اور پا3 سے منسلک ہیں۔ پورٹ پن PD0 سے PD3 اور PD7 کے ذریعہ مائکروقابو کنٹرولر کی آؤٹ پٹ IN1، IN4 کو کھلایا جاتا ہے اور موٹر ڈرائیور L293D IC کے پنوں EN1 ، EN2 کو قابل بناتا ہے۔ دو DC موٹریں چلائیں .

سرکٹ ڈایاگرام آف سیل فون آپریٹڈ لینڈ روور
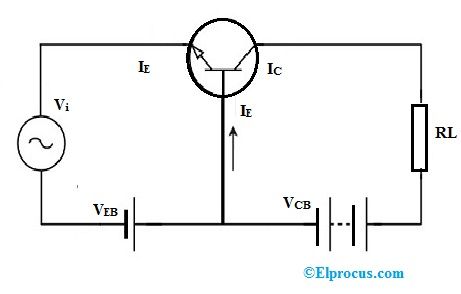
اس سرکٹ میں ، ایس ون سوئچ دستی ری سیٹ کے لئے استعمال ہوتا ہے۔ مائکروکانٹرولر کا آؤٹ پٹ ڈی سی موٹروں کو چلانے کے ل enough کافی نہیں ہے ، لہذا موٹر گھماؤ کے ل current موجودہ ڈرائیورز ضروری ہیں۔ L293D موٹر ڈرائیور کو 4.5 ایم سے لے کر 36V تک وولٹیج میں 600 ایم اے تک کی دوائی ڈرائیو کرینٹ فراہم کرنے کے لئے تیار کیا گیا ہے ، جو اس کو بناتا ہے۔ DC موٹروں کو چلانے کے لئے آسان ہے۔ L293D موٹر ڈرائیور چار ڈرائیوروں پر مشتمل ہے۔ IN1 اور OUT1 اور OUT4 کے ذریعہ پنوں IN1 اور OUT4 کے ذریعہ ڈرائیور 1 کے ذریعہ ڈرائیور 1 کے ان پٹ اور آؤٹ پٹ پن ہیں۔ 1،2،3 اور 4 ڈرائیور قابل پن1 (EN1) اور پن 9 (EN2) کے ذریعہ فعال ہیں۔ جب ان پٹ EN1 (پن 1) قابل بنائے تو زیادہ ، ڈرائیور 1 اور 2 قابل ہوجاتے ہیں۔ اسی طرح ، ان پٹ EN2 (پن 9) قابل بنائے جانے سے ڈرائیور 3 کو قابل بناتا ہے۔
فوائد اور نقصانات:
سیل فون سے چلنے والے-روبوٹک لینڈ لینڈور کے فوائد میں وائرلیس کنٹرولنگ فراہمی اور نگرانی کا نظام ، 3G ٹیکنالوجی پر مبنی گاڑیوں کی نیویگیشن ، اور سیل فون کے نیٹ ورک پر مبنی لامحدود آپریشنل رینج شامل ہیں۔ نقصان میں شامل ہیں: سیل فون بلنگ زیادہ ہونے کی وجہ سے قیمت زیادہ ہے موبائل بیٹریاں خارج : بیٹریوں سے وابستہ خارج ہونے والے مسئلے کی وجہ سے فوری خارج ہونے والے مادہ کی وجہ سے بیٹریاں ضائع ہوجاتی ہیں کیونکہ بوجھ زیادہ موافقت پذیر ہے: سسٹم تمام سیل فونز کے مطابق نہیں ہے ، لیکن ہیڈسیٹ کے ساتھ صرف وہی استعمال ہوسکتا ہے۔
اس طرح ، سیل فون سے چلنے والا یہ روبوٹ پروجیکٹ موبائل ایپلی کیشنز کے ذریعہ فوجی گاڑیوں کو کنٹرول کرنے کے لئے فوجی استعمال میں بہت مفید ہے۔ مستقبل میں ، ہم a کا بندوبست کرکے دشمنوں کی پوزیشن کا پتہ لگاسکتے ہیں وائرلیس کیمرہ لینڈ روور روبوٹک گاڑی میں یہ منصوبہ ماہرین تعلیم میں بھی مددگار ثابت ہوسکتا ہے کیونکہ طلبا اس منصوبے میں تجویز کردہ مختلف اصطلاحات اور اصول سیکھ سکتے ہیں۔ اس منصوبے سے طلبا کو ان کے جدید افکار اور نظریات کو شامل کرنے میں مدد ملے گی روبوٹکس کے منصوبے تیار کریں .
تصویر کے کریڈٹ:
- سیل فون آپریٹڈ لینڈ روور بذریعہ santoshbanisetty
- بذریعہ سیل فون آپریٹڈ لینڈ روور کا سرکٹ ڈایاگرام انجینئر گیراج





{kind=link}