ایک سرکٹ جو صارف کو منسلک پوٹینومیٹر کو گھومنے کے ذریعہ منسلک موٹر کی رفتار کو خطی طور پر کنٹرول کرنے کے قابل بناتا ہے ، اسے موٹر اسپیڈ کنٹرولر سرکٹ کہتے ہیں۔
ڈی سی موٹرز کے لئے اسپیڈ کنٹرولر سرکٹس بنانے کے لئے آسان 3 یہاں پیش کیا گیا ہے ، ایک موسفٹ IRF540 کا استعمال کرتے ہوئے ، دوسرا آئی سی 555 کا استعمال کرتے ہوئے اور دوسرا آئی سی 556 کے ساتھ تیسرا تصور ٹارک پروسیسنگ کی خصوصیات ہے۔
ڈیزائن # 1: موسفٹ پر مبنی ڈی سی موٹر اسپیڈ کنٹرولر
ایک بہت ہی ٹھنڈا اور آسان DC موٹر اسپیڈ کنٹرولر سرکٹ صرف ایک ہی موسفٹ ، ریزسٹر اور ایک برتن استعمال کرکے بنایا جاسکتا ہے ، جیسا کہ ذیل میں دکھایا گیا ہے:

بی جے ٹی ایمٹر پیروکار استعمال کرنا

جیسا کہ دیکھا جاسکتا ہے کہ اس ترتیب کے بارے میں مزید معلومات کے ل the ، مصطفے کو بطور سورس پیروکار یا عام ڈرین موڈ کے طور پر دھاندلی کی جاتی ہے۔ اس پوسٹ سے رجوع کریں ، جو بی جے ٹی ورژن پر تبادلہ خیال کرتا ہے ، اس کے باوجود کام کرنے کا اصول ایک ہی ہے۔
مذکورہ بالا DC موٹر کنٹرولر ڈیزائن میں ، برتن کی ایڈجسٹمنٹ موسفٹ کے گیٹ کے پار ایک مختلف ممکنہ فرق پیدا کرتی ہے ، اور موूसفٹ کا ماخذ پن آسانی سے اس امکانی فرق کی قیمت کی پیروی کرتا ہے اور اسی کے مطابق موٹر میں وولٹیج کو ایڈجسٹ کرتا ہے۔
اس سے یہ ظاہر ہوتا ہے کہ ماخذ ہمیشہ گیٹ وولٹیج سے 4 یا 5V پیچھے رہتا ہے اور اس فرق سے مختلف / نیچے ہوجاتا ہے ، اور موٹر میں 2V اور 7V کے درمیان مختلف وولٹیج پیش کرتا ہے۔
جب گیٹ وولٹیج 7V کے آس پاس ہوتا ہے تو ، منبع پن موٹر کو کم سے کم 2V سپلائی کرے گا جس کی وجہ سے موٹر پر انتہائی سست رفتار گھوم جاتی ہے ، اور جب برتن میں ایڈجسٹمنٹ پورے 12V کو پورے گیٹ کے اس پار تیار کرے گی تو وہ منبع پن کے اس پار دستیاب ہوگی۔ موسفٹ۔
یہاں ہم واضح طور پر دیکھ سکتے ہیں کہ موزفٹ سورس پن گیٹ کے 'پیروی' کرتے ہوئے معلوم ہوتا ہے اور اسی وجہ سے نام کا ماخذ پیروکار ہے۔
ایسا ہوتا ہے کیوں کہ موویز کو بہتر طریقے سے چلانے کے ل. موزفےٹ کے گیٹ اور سورس پن کے درمیان فرق ہمیشہ 5V کے آس پاس ہونا چاہئے۔
بہرحال ، مذکورہ بالا ترتیب موٹر پر ہموار اسپیڈ کنٹرول نافذ کرنے میں معاون ہے ، اور ڈیزائن کو کافی سستے سے بنایا جاسکتا ہے۔
مسجفٹ کی جگہ پر بی جے ٹی کا بھی استعمال کیا جاسکتا ہے ، اور حقیقت میں بی جے ٹی موٹر کے اس پار تقریبا 1V سے 12V تک اعلی کنٹرول رینج تیار کرے گی۔
ویڈیو ڈیمو
https://youtu.be/W762NTuQ19gجب موٹر کی رفتار کو یکساں اور موثر طریقے سے کنٹرول کرنے کی بات آتی ہے تو ، پی ڈبلیو ایم پر مبنی کنٹرولر ایک بہترین آپشن بن جاتا ہے ، یہاں ہم اس آپریشن کو نافذ کرنے کے لئے ایک سادہ سرکٹ کے بارے میں مزید معلومات حاصل کریں گے۔
ڈیزائن # 2: آئی سی 555 کے ساتھ پی ڈبلیو ایم ڈی سی موٹر کنٹرول
PWM استعمال کرنے والے ایک سادہ موٹر اسپیڈ کنٹرولر کے ڈیزائن کو مندرجہ ذیل سمجھا جاسکتا ہے:
ابتدائی طور پر جب سرکٹ سے چلتا ہے ، ٹرگر پن منطق کی کم پوزیشن میں ہوتا ہے کیونکہ کیپسیٹر سی 1 چارج نہیں ہوتا ہے۔
مذکورہ بالا شرائط دو طرفہ سائیکل کا آغاز کرتی ہیں ، جس سے آؤٹ پٹ کو اعلی منطق میں تبدیل کیا جاتا ہے۔
ایک اعلی پیداوار اب کیپسیٹر کو D2 کے ذریعہ چارج کرنے پر مجبور کرتی ہے۔
وولٹیج کی سطح پر پہنچنے پر جو سپلائی کا 2/3 ہے ، پن # 6 جو آئی سی ٹرگرس کی دہلیز ہے۔
لمحاتی پن # 6 ٹرگر ، پن # 3 اور پن # 7 منطق کم کی طرف لوٹتی ہے۔
پن # 3 کم پر ، C1 پھر سے D1 کے ذریعے خارج ہونے لگتا ہے ، اور جب C1 میں وولٹیج سپلائی وولٹیج کے 1/3 کی سطح سے نیچے آجاتا ہے تو ، پن # 3 اور پن # 7 دوبارہ بلند ہوجاتا ہے ، جس کی وجہ سے سائیکل کی پیروی ہوتی ہے۔ اور دہراتے رہیں۔
یہ دلچسپ بات ہے کہ ، سی 1 میں ڈوڈس ڈی 1 ، ڈی 2 اور بالترتیب برتن کے ذریعہ طے شدہ مزاحمتی ہتھیاروں کے ذریعے چارج اور خارج ہونے والے مادہ کے عمل کے لئے دو سخت راستے ہیں۔
اس کا مطلب یہ ہے کہ سی 1 کے ذریعہ جس مزاحمت کا سامنا کرنا پڑتا ہے جبکہ چارج اور خارج ہونے والے مادے ایک جیسے ہی رہتے ہیں ، چاہے برتن کیسے ترتیب دیا جائے ، لہذا آؤٹ پٹ پلس کی طول موج ہمیشہ ایک ہی رہتی ہے۔
تاہم ، چونکہ معاوضہ یا خارج ہونے والے وقت کی مدت ان کے راستوں میں آنے والی مزاحمت کی قیمت پر منحصر ہوتی ہے ، لہذا برتن اپنی ایڈجسٹمنٹ کے مطابق ان وقت کی مدت کو بڑی تیزی سے طے کرتا ہے۔
چونکہ انچارج اور خارج ہونے والے وقت کے ادوار براہ راست آؤٹ پٹ ڈیوٹی سائیکل کے ساتھ جڑے ہوئے ہیں ، لہذا یہ برتن کی ایڈجسٹمنٹ کے مطابق مختلف ہوتا ہے ، جس سے آؤٹ پٹ میں پی ڈبلیو ایم کی مختلف دالوں کو مطلوبہ شکل مل جاتی ہے۔
مارک / اسپیس تناسب کا اوسط نتیجہ پی ڈبلیو ایم آؤٹ پٹ کو جنم دیتا ہے جس کے نتیجے میں موٹر کی ڈی سی اسپیڈ کنٹرول ہوتی ہے۔
پی ڈبلیو ایم دالوں کو کسی موصافٹ کے گیٹ پر کھلایا جاتا ہے جو برتن کی ترتیب کے جواب میں منسلک موٹر کرنٹ پر رد عمل ظاہر کرتا ہے اور اس کو کنٹرول کرتا ہے۔
موٹر کے ذریعہ موجودہ سطح اس کی رفتار کا فیصلہ کرتی ہے اور اس طرح برتن کے ذریعے قابو پانے والے اثر کو نافذ کرتی ہے۔
آایسی سے آؤٹ پٹ کی فریکوئنسی کا اندازہ اس فارمولے سے کیا جاسکتا ہے:
F = 1.44 (VR1 * C1)
ضرورت کے مطابق یا بوجھ موجودہ کے مطابق اس موزفےٹ کا انتخاب کیا جاسکتا ہے۔
مجوزہ DC موٹر اسپیڈ کنٹرولر کا سرکٹ ڈایاگرام نیچے دیکھا جاسکتا ہے۔

نمونہ:

ویڈیو جانچ کا ثبوت:
https://youtu.be/M-F7MWcSiFYمذکورہ ویڈیو کلپ میں ہم دیکھ سکتے ہیں کہ DC موٹر کی رفتار کو کنٹرول کرنے کے لئے کس طرح IC 555 پر مبنی ڈیزائن استعمال کیا جاتا ہے۔ جیسا کہ آپ دیکھ سکتے ہیں ، اگرچہ بلب پی ڈبلیو ایم کے جواب میں بالکل کام کرتا ہے اور اس کی شدت کم سے کم چمک سے زیادہ سے زیادہ کم تک مختلف ہوتی ہے ، موٹر نہیں چلتا ہے۔
PWMs کو نمایاں طور پر اعلی نبض کی چوڑائیوں میں ایڈجسٹ کرنے کے بعد موٹر ابتدا میں تنگ PWM کا جواب نہیں دیتی ہے ، بلکہ ایک جھٹکے سے شروع ہوتی ہے۔
اس کا مطلب یہ نہیں ہے کہ سرکٹ میں دشواری ہے ، اس کی وجہ یہ ہے کہ ڈی سی موٹر آرمرچر میگنےٹ کے ایک جوڑے کے درمیان مضبوطی سے پکڑا جاتا ہے۔ آغاز شروع کرنے کے لئے آرمیچر کو اپنی گردش کو مقناطیس کے دو قطبوں سے عبور کرنا پڑتا ہے جو ایک سست اور نرم حرکت کے ساتھ نہیں ہوسکتا ہے۔ اس کا آغاز زور سے کرنا ہے۔
یہی وجہ ہے کہ موٹر ابتدائی طور پر پی ڈبلیو ایم کے لئے ایک اعلی ایڈجسٹمنٹ کی ضرورت ہوتی ہے اور ایک بار جب گردش شروع ہوجاتی ہے تو اس کے بعد آریچر کچھ حرکیاتی توانائی حاصل کرلیتا ہے اور اب سست رفتار حاصل کرنا تنگ پی ڈبلیو ایم کے ذریعے ممکن ہوجاتا ہے۔
لیکن پھر بھی ، محض حرکت پذیر سست حالت میں گھومنا اسی وجہ سے ناممکن ہوسکتا ہے جس کی وضاحت اوپر کی گئی ہے۔
میں نے ذیل میں دکھایا گیا ہے کے طور پر پہلے آریھ میں کچھ ترمیم کرکے جواب کو بہتر بنانے اور ایک تیز رفتار PWM کنٹرول حاصل کرنے کی پوری کوشش کی۔

یہ کہنے کے بعد ، اگر موٹر گیئرز یا گھرنی کے نظام کے ذریعہ موٹر سے منسلک ہو یا بوجھ سے پٹا ہو تو ، موٹر سست سطح پر بہتر کنٹرول دکھا سکتا ہے۔
ایسا ہوسکتا ہے کیونکہ بوجھ ایک دباؤ کا کام کرے گا اور سست رفتار ایڈجسٹمنٹ کے دوران کنٹرولڈ تحریک مہیا کرنے میں مددگار ہوگا۔
ڈیزائن # 3: بہتر اسپیڈ کنٹرول کیلئے آئی سی 556 کا استعمال
ڈی سی موٹر کی رفتار کو تبدیل کرنا ایسا لگتا ہے کہ یہ اتنا مشکل نہیں ہے اور آپ کو اس کے لئے بہت سارے سرکٹس مل سکتے ہیں۔
تاہم ، یہ سرکٹس کم موٹر سپیڈ پر ٹارک کی مستقل سطح کی ضمانت نہیں دیتی ہیں ، جس سے کام کاج کافی غیر موثر ہوجاتا ہے۔
اس کے علاوہ ، ناکافی ٹارک کی وجہ سے بہت کم رفتار پر ، موٹر اسٹال ہوتا ہے۔
ایک اور سنگین خرابی یہ ہے کہ ، ان سرکٹس کے ساتھ موٹر ریورسال فیچر شامل نہیں ہے۔
مجوزہ سرکٹ مذکورہ بالا کوتاہیوں سے مکمل طور پر آزاد ہے اور یہاں تک کہ کم سے کم رفتار پر بھی اعلی ٹارک کی سطح پیدا اور برقرار رکھنے کے قابل ہے۔
سرکٹ آپریشن
اس سے پہلے کہ ہم مجوزہ پی ڈبلیو ایم موٹر کنٹرولر سرکٹ پر تبادلہ خیال کریں ، ہم آسان تر متبادل بھی سیکھنا چاہیں گے جو اتنا موثر نہیں ہے۔ بہر حال ، اس وقت تک مناسب سمجھا جاسکتا ہے جب تک کہ موٹر سے زیادہ بوجھ زیادہ نہ ہو ، اور جب تک رفتار کم سے کم سطح تک کم نہ ہو۔
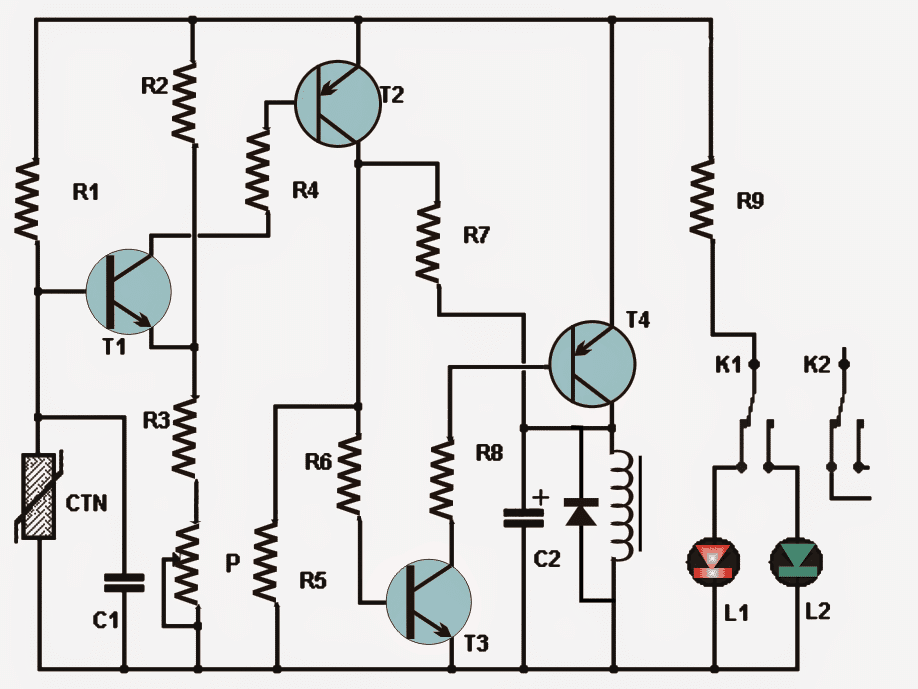
اعداد و شمار سے پتہ چلتا ہے کہ منسلک موٹر کی رفتار کو کنٹرول کرنے کے لئے کس طرح ایک بھی 556 آایسی کو استعمال کیا جاسکتا ہے ، ہم اس کی تفصیلات میں نہیں جائیں گے ، اس ترتیب کی واحد قابل ذکر خرابی یہ ہے کہ ٹارک براہ راست موٹر کی رفتار کے متناسب ہے۔
مجوزہ ہائی ٹارک اسپیڈ کنٹرولر سرکٹ ڈیزائن کی طرف واپس آتے ہوئے ، یہاں ہم نے ایک یا ایک ہی آئی سی 556 کی بجائے دو 555 آایسی استعمال کیے ہیں جس میں ایک پیکج میں دو 555 آئی سی ہیں۔
سرکٹ ڈایاگرام

اہم خصوصیات
مختصرا. مجوزہ ڈی سی موٹر کنٹرولر مندرجہ ذیل دلچسپ خصوصیات شامل ہیں:
بغیر کسی اسٹال کے ، صفر سے زیادہ سے زیادہ تک رفتار میں مسلسل مختلف ہوتی جاسکتی ہے۔
ٹارک رفتار کی سطح سے کبھی متاثر نہیں ہوتا ہے اور کم سے کم رفتار کی سطح پر بھی مستقل رہتا ہے۔
موٹر کی گردش سیکنڈ کے ایک حص withinے میں پلٹ سکتی ہے یا اس کو پلٹ سکتی ہے۔
موٹر گردش کی دونوں سمتوں میں رفتار متغیر ہے۔
دو 555 آئی سی دو الگ الگ افعال کے ساتھ تفویض کیے گئے ہیں۔ ایک حصے کو ایک حیرت انگیز ملٹی وریٹر کے طور پر تشکیل دیا گیا ہے جس میں 100 ہرٹج مربع لہر گھڑیاں پیدا ہوتی ہیں جو پیکیج کے اندر پچھلے 555 سیکشن کو کھلایا جاتا ہے۔
مذکورہ بالا تعدد PWM کی تعدد کے تعین کے لئے ذمہ دار ہے۔
ٹرانجسٹر BC 557 مستقل موجودہ ذریعہ کے طور پر استعمال ہوتا ہے جو ملحقہ سندارتر کو اپنے کلکٹر بازو پر چارج کرتا ہے۔
اس سے اوپر والے کاپاکیٹر میں آری دانت وولٹیج تیار ہوتا ہے ، جس کا موازنہ 556 آایسی کے اندر ہوتا ہے جس میں نمونے والے وولٹیج کے ساتھ بیرونی طور پر دکھائے گئے پن آؤٹ پر لگائے جاتے ہیں۔
بیرونی طور پر لاگو نمونہ وولٹیج ایک سادہ 0-12V متغیر وولٹیج بجلی کی فراہمی سرکٹ سے اخذ کیا جاسکتا ہے۔
556 آایسی پر لاگو یہ مختلف وولٹیج آؤٹ پٹ میں دالوں کے پی ڈبلیو ایم کو مختلف کرنے کے لئے استعمال ہوتا ہے اور جو آخر کار منسلک موٹر کی تیز رفتار ریگولیشن کے لئے استعمال ہوتا ہے۔
جب بھی ضرورت ہو موٹر کی سمت کو فوری طور پر پلٹنے کے لئے سوئچ S1 استعمال کیا جاتا ہے۔
حصوں کی فہرست
- R1 ، R2 ، R6 = 1K ،
- R3 = 150K ،
- R4 ، R5 = 150 اوہس ،
- R7 ، R8 ، R9 ، R10 = 470 اوہمز ،
- C1 = 0.1uF ،
- C2 ، C3 = 0.01uF ،
- C4 = 1uF / 25VT1 ،
- T2 = TIP122 ،
- T3 ، T4 = TIP127
- T5 = BC557 ،
- T6 ، T7 = BC547 ،
- D1 --- D4 = 1N5408،
- Z1 = 4V7 400mW
- آئی سی 1 = 556 ،
- S1 = SPDT ٹوگل سوئچ
مذکورہ بالا سرکٹ مندرجہ ذیل موٹر ڈرائیور سرکٹ سے متاثر ہوا جو الیکٹیکٹر الیکٹرانک انڈیا میگزین میں بہت پہلے شائع ہوا تھا۔
آئی سی 555 کا استعمال کرتے ہوئے موٹر ٹارک کو کنٹرول کرنا

موٹر ریورسال آپریشن کے لئے ڈی پی ڈی ٹی سوئچ کا استعمال کرکے ، اور اسپیڈ کنٹرول پر عمل درآمد کے لئے ایمیٹر فالوور ٹرانجسٹر کا استعمال کرکے پہلے موٹر کنٹرول آریھ کو بہت آسان بنایا جاسکتا ہے ، جیسا کہ ذیل میں دکھایا گیا ہے:

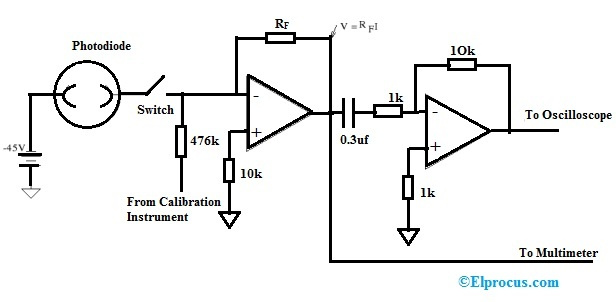
سنگل اوپ امپ کا استعمال کرتے ہوئے پریسجن موٹر کنٹرول
ڈی سی کا ایک انتہائی بہتر یا پیچیدہ کنٹرول۔ موٹر آپ op امپ اور ٹاکو جنریٹر کے استعمال سے حاصل کیا جاسکتا ہے۔ آپپیش وولٹیج حساس سوئچ کے طور پر دھاندلی کی جاتی ہے۔ سرکٹ میں ، جیسے ہی ٹاکو جنریٹر کا آؤٹ پٹ پیش سیٹ ریفرنس وولٹیج سے کم ہوتا ہے ، سوئچنگ ٹرانجسٹر آن کیا جاتا ہے اور موٹر کو 100 power بجلی فراہم کی جائے گی۔
آپٹ امپ کا سوئچنگ ایکشن صرف ریفرنس کے وولٹیج کے آس پاس مل وولٹ میں ہوتا ہے۔ آپ کو دوہری بجلی کی فراہمی کی ضرورت ہوگی ، جو صرف زینر مستحکم ہوسکتی ہے۔

یہ موٹر کنٹرولر میکانکی پریشانیوں میں کسی بھی قسم کی شمولیت کے بغیر لامحدود حد تک ایڈجسٹ رینج کے قابل بناتا ہے۔
اوپ امپ آؤٹ پٹ سپلائی ریل کی سطح کا صرف +//- 10٪ ہے ، اس طرح ایک ڈبل ایمٹر پیروکار کو بھاری موٹر سپیڈ لگانے پر قابو پایا جاسکتا ہے۔
حوالہ وولٹیج تھرمسٹسٹرز ، یا ایل ڈی آر وغیرہ کے ذریعہ طے کیا جاسکتا ہے۔ سرکٹ آریگرام میں تجرباتی طور پر مرتب کردہ آر سی اے 3047 اے اوپی امپ کا استعمال کیا گیا ہے ، اور 0.25W 6V موٹر کو ٹاکو جنریٹر کے طور پر جس نے 13000 آر پی ایم پر 4V کے ارد گرد پیدا کیا ہے۔ مطلوبہ تاثرات۔
پچھلا: 3 بہترین جول چور سرکٹس اگلا: پریشر کوکر سیٹی کاؤنٹر سرکٹ