ٹیکومیٹر ایک ایسا آلہ ہوتا ہے جو گھومنے والے جسم کی RPM یا کونیی رفتار کی پیمائش کرتا ہے۔ یہ اسپیڈومیٹر اور اوڈومیٹر سے مختلف ہے کیونکہ یہ آلات جسم کے لکیری یا ٹینجینٹل رفتار سے نمٹتے ہیں جبکہ ٹیکومیٹر a.k.a. “ٹیچ” آر پی ایم زیادہ بنیادی سے متعلق ہے۔
انکیت نیگی
ٹیکومیٹر کاؤنٹر پر مشتمل ہے اور ٹائمر یہ دونوں ایک ساتھ کام کرتے ہوئے آر پی ایم مہیا کرتے ہیں۔ ہمارے پروجیکٹ میں ہم ایسا ہی کرنے جا رہے ہیں ، اپنے ارڈینو اور کچھ سینسر کا استعمال کرتے ہوئے ہم ایک کاؤنٹر اور ٹائمر دونوں کا سیٹ اپ کریں گے اور اپنا آسان اور آسان ٹیچ تیار کریں گے۔ .
شرطیں
کاؤنٹر ایک ڈیوائس یا سیٹ اپ کے سوا کچھ نہیں ہوتا ہے جو گردش کے دوران ڈسک میں ڈاٹ کے گزرنے جیسے کسی باقاعدہ وقوع پزیر واقعے کو گن سکتا ہے۔ ابتدائی طور پر کاؤنٹر مکینیکل انتظامات اور گیئرز ، راہچٹس ، چشموں وغیرہ جیسے رابطے کے استعمال سے بنائے گئے تھے۔
لیکن اب ہم زیادہ نفیس اور انتہائی عین مطابق سینسرز اور الیکٹرانکس والے کاؤنٹر کا استعمال کر رہے ہیں۔ ٹائمر ایک الیکٹرانک عنصر ہے جو واقعات کے درمیان وقتی وقفے کی پیمائش کرنے یا وقت کی پیمائش کرنے کے قابل ہوتا ہے۔
ہمارے آردوینو یونو میں ایسے ٹائمر موجود ہیں جو نہ صرف وقت کا ٹریک رکھتے ہیں بلکہ آرڈینو کے کچھ اہم کاموں کو بھی برقرار رکھتے ہیں۔ اونو میں ہمارے پاس 3 ٹائمر ہیں جن کا نام ٹائمر0 ، ٹائمر 1 اور ٹائمر 2 ہے۔ ان ٹائمر کے درج ذیل افعال ہیں- • ٹائمر0- یونو کے افعال جیسے تاخیر () ، ملیس () ، مائکروس () یا تاخیر سے ماکروس ()۔
• ٹائمر 1- امدادی لائبریری کے کام کے لئے۔
• ٹائمر 2- ٹون () ، نوٹون () جیسے فنکشن کیلئے۔
ان افعال کے ساتھ ساتھ ، یہ 3 ٹائمر پی ڈبلیو ایم آؤٹ پٹ پیدا کرنے کے لئے بھی ذمہ دار ہیں جب پی این ڈبلیو نامزد پن میں اینالاگ رائٹ () کمانڈ استعمال کی جاتی ہے۔
مداخلت کا تصور
اریڈینو اونو میں ایک پوشیدہ ٹول موجود ہے جو ہمارے لئے ٹائمر انٹروپٹس کے نام سے مشہور کام کی پوری رسائی تک رسائی فراہم کرسکتا ہے۔ انٹرٹراپٹ واقعات یا ہدایات کا ایک مجموعہ ہے جسے ڈیوائس کے موجودہ کام میں رکاوٹ ڈالنے پر پھانسی دی جاتی ہے ، یعنی کوئی بات نہیں کوڈز سے پہلے آپ کا یونیو عمل کر رہا تھا لیکن ایک بار جب ایک رکاوٹ Ardino کہا جاتا ہے تو مداخلت میں بیان کردہ ہدایت پر عمل کریں۔


اب انٹریٹ کو کچھ مخصوص حالت میں کہا جاسکتا ہے جو صارف انبلٹ آرڈینوو سنٹیکس استعمال کرتے ہوئے بیان کرتے ہیں۔ ہم اس رکاوٹ کو ہمارے پروجیکٹ میں استعمال کریں گے جو ہمارے ٹیکومیٹر کو مزید مستحکم بنانے کے ساتھ ساتھ ویب کے ارد گرد موجود دیگر ٹیکومیٹر پروجیکٹ کے مقابلے میں زیادہ عین مطابق بناتا ہے۔
ارڈوینو کا استعمال کرتے ہوئے اس ٹیکومیٹر پروجیکٹ کے لئے ضروری اجزاء
• ہال اثر سینسر (تصویر 1)

rdu ارڈینو اونو

• چھوٹا مقناطیس

um جمپر تاروں
ot گھومنے والی چیز (موٹر شافٹ)

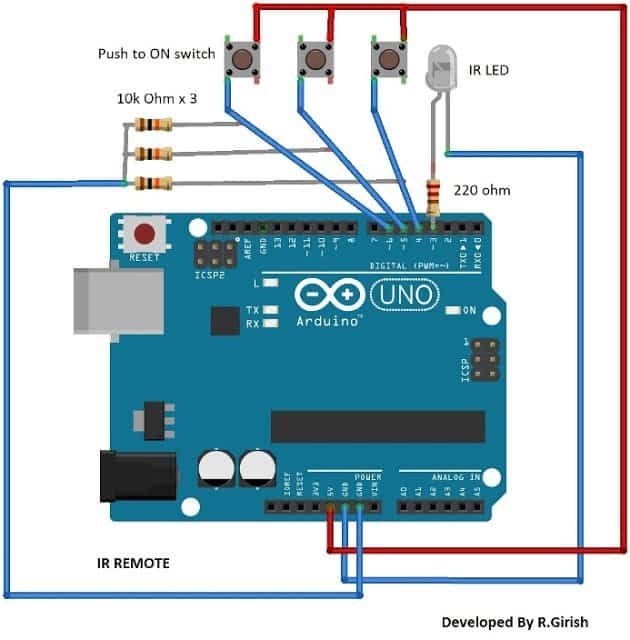
سرکٹ سیٹ اپ
creating بنانے کے لئے ترتیب مندرجہ ذیل ہے۔
sha جس شافٹ میں گردش کی رفتار کو ناپنا ہے اس میں گلو گن یا برقی ٹیپ کا استعمال کرتے ہوئے ایک چھوٹا مقناطیس لگایا گیا ہے۔
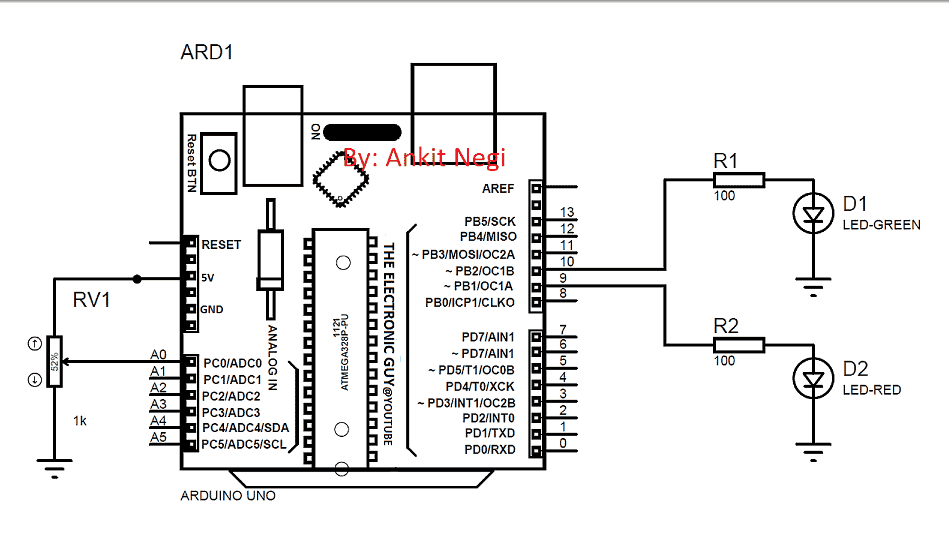
• ہال اثر سینسر کے سامنے ایک ڈیٹیکٹر اور رابطوں کے لئے 3 پن ہیں۔
• Vcc اور Gnd پنز بالترتیب 5V اور Ardino کے Gnd پن سے جڑے ہوئے ہیں۔ ان پٹ سگنل فراہم کرنے کے ل the سینسر کا آؤٹ پٹ یونو کے ڈیجیٹل پن 2 سے منسلک ہے۔
• سارے اجزاء کو ایک ماؤنٹ بورڈ میں طے کیا جاتا ہے اور بورڈ سے ہال ڈٹیکٹر کی نشاندہی کی جاتی ہے۔
پروگرامنگ
int sensor = 2 // Hall sensor at pin 2
volatile byte counts
unsigned int rpm //unsigned gives only positive values
unsigned long previoustime
void count_function()
{ /*The ISR function
Called on Interrupt
Update counts*/
counts++
}
void setup() {
Serial.begin(9600)
//Intiates Serial communications
attachInterrupt(0, count_function, RISING) //Interrupts are called on Rise of Input
pinMode(sensor, INPUT) //Sets sensor as input
counts= 0
rpm = 0
previoustime = 0 //Initialise the values
}
void loop()
{
delay(1000)//Update RPM every second
detachInterrupt(0) //Interrupts are disabled
rpm = 60*1000/(millis() - previoustime)*counts
previoustime = millis() //Resets the clock
counts= 0 //Resets the counter
Serial.print('RPM=')
Serial.println(rpm) //Calculated values are displayed
attachInterrupt(0, count_function, RISING) //Counter restarted
}
کوڈ اپ لوڈ کریں۔
کوڈ جانتے ہیں
ہمارا ٹیکومیٹر ہال اثر سینسر کا استعمال کرتا ہے ہال اثر سینسر ہال اثر پر مبنی ہے جو اس کے دریافت کنندہ ایڈون ہال کے نام پر رکھا گیا ہے۔
ہال کا اثر موجودہ لے جانے والے موصل کی طرف سے وولٹیج کی نسل پیدا کرنے کا رجحان ہے جب کسی مقناطیسی فیلڈ کو موجودہ بہاؤ کے لئے کھڑا کردیا جاتا ہے۔ اس وولٹیج نے اس رجحان کی وجہ سے ان پٹ سگنل تیار کرنے میں مدد فراہم کی۔ جیسا کہ ذکر کیا گیا ہے اس پروجیکٹ میں انٹریپٹ کا استعمال کیا جائے گا ، انٹراپٹ کو کال کرنے کے لئے ہمیں کچھ حالت طے کرنا ہوگی۔ آرڈوینو یونو کے پاس مداخلتیں کال کرنے کے لئے 2 شرائط ہیں۔
بڑھتی ہوئی- جب اس کا استعمال ہوتا ہے تو ، جب ان پٹ سگنل LOW سے HIGH تک جاتا ہے تو ہر بار انٹراپٹ کہا جاتا ہے۔
جب یہ استعمال ہوتا ہے تو ، جب سگنل HIGH سے LOW جاتا ہے تو مداخلت کو کہتے ہیں۔
ہم نے رائزنگ کا استعمال کیا ہے ، کیا ہوتا ہے جب جب شافٹ میں گھومنے والا مقناطیس یا گھومنے والی چیز ہال ڈیٹیکٹر کے قریب آجاتی ہے تو ان پٹ سگنل تیار ہوجاتا ہے اور انٹراپٹ کو طلب کیا جاتا ہے ، جب مداخلت میں خلل ڈالنے میں خلل پڑتا ہے ، جس میں اضافے شامل ہوتے ہیں۔ اہمیت شمار ہوتی ہے اور اس طرح شمار ہوتا ہے۔
ہم نے ٹائمر کو سیٹ اپ کرنے کے لئے خطوط میں ارڈینو اور پچھلے وقت (متغیر) کی ملز () فنکشن استعمال کیا ہے۔
اس طرح RPM کا حساب کتاب کے آخر میں ریاضی کے تعلق سے کیا جاتا ہے۔
RPM = گنتی / وقت کو ملی سیکنڈ کو منٹ اور دوبارہ ترتیب میں تبدیل کرنا ہمیں فارمولہ = 60 * 1000 / (ملیس () - پچھلی وقت) * گنتی میں ملتا ہے۔
تاخیر (1000) وقت کے وقفے کا تعین کرتی ہے جس کے بعد اسکرین پر آر پی ایم کی قیمت کو اپ ڈیٹ کیا جائے گا ، آپ اپنی ضروریات کے مطابق اس تاخیر کو ایڈجسٹ کرسکتے ہیں۔
حاصل کردہ RPM کی اس قدر کو گھومنے والی چیز کی رقیق رفتار کا حساب لگانے کے لئے ریلیشن- v = (3.14 * D * N) / 60 m / s کا استعمال کرتے ہوئے استعمال کیا جاسکتا ہے۔
گھومنے والے پہیے یا ڈسک کے ذریعہ طے شدہ فاصلے کا حساب کرنے کے لئے بھی RPM کی قدر کا استعمال کیا جاسکتا ہے۔
سیریل مانیٹر پر اقدار کی پرنٹنگ کے بجائے ایل سی ڈی ڈسپلے (16 * 2) اور بیٹری کو بہتر استعمال کے لئے منسلک کرکے اس ڈیوائس کو زیادہ کارآمد بنایا جاسکتا ہے۔
پچھلا: آئی سی 555 کا استعمال کرتے ہوئے اسٹیپر موٹر ڈرائیور سرکٹ اگلا: ارڈینو کا استعمال کرتے ہوئے ڈیجیٹل کیپسیٹینس میٹر سرکٹ