پوسٹ میں ڈی سی موٹر کنٹرولر کی وضاحت کی گئی ہے جس میں موٹر کو مستقل تیزرفتار چلانے کے قابل بنانے کے لئے مستقل طور پر ٹارک معاوضے کی سہولت دی گئی ہے۔
عام اسپیڈ کنٹرولرز کی خرابی
اکثریت کی ایک کمی آسان رفتار کنٹرولرز کیا وہ صرف موٹر کو پہلے سے طے شدہ مستقل وولٹیج کے ساتھ فراہم کرتے ہیں۔ نتیجے کے طور پر ، رفتار مستقل نہیں رہتی ہے اور موٹر پر بوجھ کے ساتھ مختلف ہوتی ہے ، جس کی وجہ ٹورک معاوضے کی عدم موجودگی ہوتی ہے۔
مثال کے طور پر ایک ماڈل ٹرین میں ، آسان کنٹرولرز کے ساتھ ٹرین کی رفتار آہستہ آہستہ چڑھنے کے میلان کے ل decre کم ہوتی ہے اور نیچے کی طرف جاتے ہوئے تیز ہوتی ہے۔
لہذا ماڈل ٹرینوں کے لئے برتن کنٹرول ایڈجسٹمنٹ کے لئے منتخب موٹر کی رفتار برقرار رکھنا اسی طرح اس بوجھ پر منحصر ہوتا ہے جس سے انجن ٹگ ہوسکتا ہے۔
اس مضمون میں بیان کردہ مستقل طور پر موٹر موٹر سپیڈ کنٹرولر سرکٹ موٹر اسپیڈ کو ٹریک کرکے اور پہلے سے طے شدہ کنٹرول سیٹنگ کو مستقل برقرار رکھنے سے اس مسئلے سے چھٹکارا پاتا ہے ، چاہے موٹر پر بوجھ کچھ بھی ہو۔
سرکٹ زیادہ تر ماڈلز میں لاگو کیا جاسکتا ہے جو ڈی سی مستقل مقناطیس موٹر کا استعمال کرتے ہیں۔
بیک EMF فیکٹر کا حساب لگانا
موٹر ٹرمینلز کے اس پار وولٹیج میں دو عوامل شامل ہیں ، بیک e.m.f. موٹر کے ذریعہ تیار کیا گیا ، اور وولٹیج کو اسامیچر مزاحمت کے پار گرا دیا گیا۔
پچھلی e.m.f. موٹر سمیٹ کے ذریعہ پیدا کی جانے والی رفتار عام طور پر موٹر سپیڈ کے متناسب ہوتی ہے ، جس کا مطلب ہے کہ اس بیک ایم ایف مواد کو ماپنے سے موٹر سپیڈ کی نگرانی کی جاسکتی ہے۔ لیکن ، بنیادی مسئلہ e.m.f. کو الگ تھلگ اور پیچھے کا پتہ لگانا ہے۔ آرمیچر مزاحمت وولٹیج سے۔
فرض کریں کہ اس کے بعد موٹر کے ساتھ ایک علیحدہ ریزسٹر لگا ہوا ہے ، اس بات پر غور کرتے ہوئے کہ ایک عام واحد موجودہ اس مزاحم سے گزرتا ہے اور آرمیچر مزاحمت سے بھی گزرتا ہے ، دو سیریز کے ریزسٹروں میں سے وولٹیج ڈراپ اچھmatوچوں کے برابر ہوسکتا ہے۔
دراصل ، یہ فرض کیا جاسکتا ہے کہ جب یہ دونوں مزاحمتی اقدار یکساں ہیں تو پھر مزاحموں میں سے ہر ایک میں دو وولٹیج کی شدت بھی ایک جیسی ہوگی۔ اس اعداد و شمار کے ساتھ ، یہ ممکن ہے کہ موٹر وولٹیج سے R3 کا وولٹیج ڈراپ کٹوا سکے ، اور پروسیسنگ کے لئے مطلوبہ بیک e.m.f ویلیو حاصل کریں۔

مسلسل ٹورک کے لئے بیک ای ایم ایف پر کارروائی کررہی ہے
مجوزہ سرکٹ مسلسل e.m.f پر نگرانی کرتا ہے۔ اور اس کے مطابق موٹر موجودہ کو باقاعدہ بناتا ہے تاکہ یہ یقینی بنایا جاسکے کہ ، تفویض کردہ برتن پر قابو پانے کے لئے ، پیچھے کی صبح کے ساتھ ساتھ موٹر کی رفتار بھی مستقل ٹارک پر برقرار رہتی ہے۔
سرکٹ کی تفصیل کو آسان بنانے کے ل it یہ سمجھا جاتا ہے کہ P2 ایڈجسٹ کیا گیا ہے اور اسے اپنے مرکز کی حیثیت سے برقرار رکھا گیا ہے ، اور ریزسٹر R3 موٹر آرمیچر کی مزاحمت والی قیمت کے مساوی کے طور پر منتخب کیا گیا ہے۔
موٹر وولٹیج کا حساب لگانا
موٹر وولٹیج کا حساب بیک e.m.f. کرکے شامل کیا جاسکتا ہے۔ وولٹیج کے ساتھ وا موٹر موٹر داخلی مزاحمت Vr کے پار گرا دیا۔
یہ خیال کرتے ہوئے کہ R3 ایک وولٹیج Vr گراتا ہے ، آؤٹ پٹ وولٹیج Vo V + 2 V کے برابر ہوگا۔
آئی سی 1 کے الٹی ان پٹ (-) میں وولٹیج وا + وی آر ہوگی ، اور یہ کہ غیر الٹ ان پٹ (+) میں وی + (وا + 2 وی آر - وی) / 2 ہوگا
چونکہ مذکورہ بالا دو وولٹیج کی جہت برابر ہونا چاہئے ، لہذا ہم مندرجہ بالا مساوات کو اس طرح ترتیب دیتے ہیں:
وا + وی آر = وی + (وا + 2 وی آر - وی) / 2
اس مساوات کو آسان بنانا وا = vi فراہم کرتا ہے۔
مذکورہ بالا مساوات اس بات کی نشاندہی کرتی ہے کہ پیچھے e.m.f. موٹر کا کنٹرول وولٹیج کی طرح مسلسل اسی سطح پر ہوتا ہے۔ اس سے موٹر P1 اسپیڈ ایڈجسٹمنٹ کی کسی بھی مخصوص ترتیب کیلئے مستقل رفتار اور ٹارک کے ساتھ کام کرنے کی اجازت دیتا ہے۔
P2 کو اس فرق کی سطح کو معاوضہ دینے کے لئے شامل کیا گیا ہے جو R3 مزاحمت اور آرمرچر مزاحمت کے درمیان موجود ہوسکتی ہے۔ یہ نان الورٹنگ ان پٹ آپپ AMP پر مثبت آراء کی شدت کو ایڈجسٹ کرکے اس کو انجام دیتا ہے۔
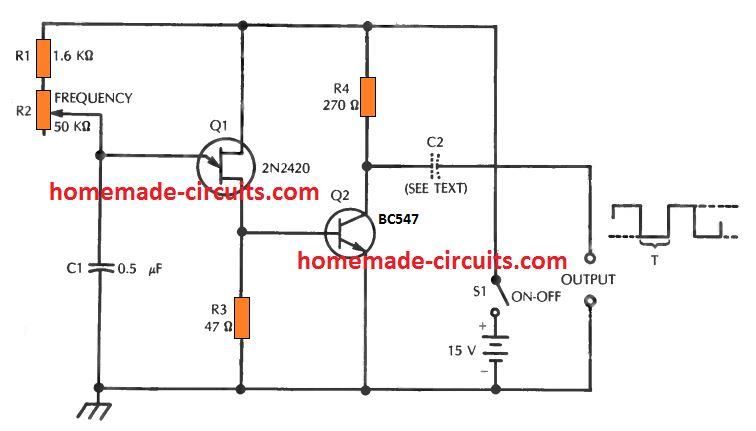
اوپ AMP LM3140 بنیادی طور پر موٹر آرمیچر میں تیار کردہ وولٹیج کا موازنہ موٹر کے پیچھے والے ایم ایف برابر کے ساتھ کرتا ہے اور T1 2N3055 کی بنیادی صلاحیت کو منظم کرتا ہے۔
T1 بطور ایک تشکیل کیا جارہا ہے emitter پیروکار اپنی بنیادی صلاحیت کے مطابق موٹر کی رفتار کو منظم کرتا ہے۔ یہ موٹر کے اوپر وولٹیج میں اضافہ کرتا ہے جب اوپ امپ کے ذریعہ ایک اعلی بیک ایم ایف کا پتہ چلتا ہے ، جس کے نتیجے میں موٹر کی رفتار میں اضافہ ہوتا ہے ، اور اس کے برعکس ہوتا ہے۔
T1 کو مناسب کام کرنے کے ل suitable ایک مناسب ہیٹ سنک کے اوپر لگایا جانا چاہئے۔
سرکٹ کیسے مرتب کریں
مستقل ٹارک موٹر اسپیڈ کنٹرولر سرکٹ کا قیام پی 2 کو موٹر کے ساتھ مختلف بوجھ کے ساتھ ایڈجسٹ کرکے کیا جاتا ہے جب تک کہ لوڈنگ حالات سے قطع نظر موٹر مستقل ٹارک حاصل نہ کرے۔
جب ماڈل ٹرینوں کے لئے سرکٹ کا اطلاق ہوتا ہے تو ، P2 کی طرف P2 کی طرف زیادہ رخ نہ کرنے کا خیال رکھنا چاہئے جس کے نتیجے میں ماڈل ٹرین کی رفتار آہستہ ہوجائے گی ، اور اس کے برعکس P2 کو مخالف سمت میں زیادہ موڑ نہیں کرنا پڑے گا ، جس کا نتیجہ ہوسکتا ہے کہ ایک اعلی چڑھائی پر چڑھنے کے دوران ٹرین کی رفتار دراصل تیز ہوجاتی ہے۔
پچھلا: سادہ نی-سی ڈی بیٹری چارجر سرکٹس کی تلاش کی اگلا: منی ٹرانسیور سرکٹ