اس پوسٹ میں ہم جانچ کرتے ہیں کہ BLDC موٹر کیا ہے اور اس کے بعد ہم سینسر لیس BLDC موٹر ڈرائیور سرکٹ کے ڈیزائن کے بارے میں سیکھتے ہیں۔
بی ایل ڈی سی سی پی یو کے پرستار
سی پی یوز ، وولٹیج اسٹیبلائزرز ، ڈی وی ڈی پلیئرز اور اسی طرح کے دیگر سازوسامان میں تیزی سے متحرک مداحوں کو دیکھا ، جو کم سے کم جگہ استعمال کرتے ہوئے ، انتہائی کارکردگی کے ساتھ کام کرتے ہیں ، موجودہ اور ابھی تک خاص آلات کے لئے بیان کردہ اہم کاموں کو انجام دینے کے قابل ہیں؟
ہاں ، یہ تمام جدید ورژن بی ایل ڈی سی کے شائقین یا برش لیس ڈی سی موٹرز ہیں جو پرانے روایتی بریش موٹروں سے کہیں زیادہ عمدہ ہیں۔

تصویری بشکریہ: https://en.wikedia.org/wiki/Computer_fan#/media/File:Geh٪C3٪A4usel٪C3٪BCfter.jpg
تاہم ، ایک بی ایل ڈی سی موٹر کو ایک نفیس ڈرائیور سرکٹ کی ضرورت ہوگی ، اور ہاں یہ تمام سی پی یو پرستار ان ڈرائیور ماڈیول کو ان بلٹ پر رکھتے ہیں ، اگرچہ یہ ایک عام ڈی سی کا استعمال کرتے ہوئے آسانی سے چل پاتے ہیں ، داخلی طور پر یہ نظام پہلے ہی سمارٹ سرکٹ سے لیس ہے۔
بی ایل ڈی سی موٹر ڈرائیور
یہاں ہم ایسے ہی سمارٹ بی ایل ڈی سی موٹر ڈرائیور سرکٹ کے بارے میں سیکھیں گے ، کسی بھی چھوٹی بی ایل ڈی سی موٹر کو ناقابل یقین کارکردگی سے چلانے کے لئے سنگل چپ DRV10963 کا استعمال کرتے ہوئے ، اور بعد میں آنے والے ایک آرٹیکل میں دیکھیں گے کہ اس ڈرائیونگ کے لئے بھی کس طرح اس آئی سی سرکٹ کو اپ گریڈ کیا جاسکتا ہے۔ طاقتور اعلی موجودہ BLDCs جیسے ہیں کواڈ کوپٹرز میں استعمال کیا جاتا ہے۔
لیکن اس سے پہلے بی ایل ڈی سی موٹرز کے بارے میں تھوڑا سا سیکھنا دلچسپ ہوگا۔
برش اور برش لیس ڈی سی موٹرز کے مابین فرق
برش شدہ موٹر اور برش لیس موٹر اور کارکردگی کی شرح کے مابین فرق واضح ہے۔
چونکہ صاف شدہ موٹرز زخموں کی آریچر خود میگنےٹ کے درمیان حرکت پذیر ہوتی ہے ، اس لئے 'برش' (رگڑتے ہوئے رابطوں) کو ملازمت کرنا پڑتا ہے تاکہ حرکت پذیر کوئلہ ٹرمینلز خود سپلائی کے ذرائع تک پہنچائے بغیر سپلائی وولٹیج کو مستقل طور پر حاصل کرنے کے قابل ہوجائے ، جو دوسری صورت میں اس کی وجہ سے ناممکن کام کرنا اور کارروائیوں کو خطرے میں ڈالنا۔
برش کے بغیر موٹر میں ، کنڈلی یا سمیٹ کبھی حرکت نہیں کرتا اور مستقل ہوتا ہے ، یہاں روٹر مستقل میگنےٹ کا ایک سیٹ اٹھاتا ہے اور گرد گھومنے والے مقناطیسی بہاؤ کے اثر میں گھومتا ہے۔
چونکہ مقناطیس تمام پریشانیوں سے پاک ہے ، اور اقتدار کو سنبھالنے یا حاصل کرنے کے لminals ٹرمینلز کو شامل کیے بغیر کام کرنے کے قابل ہے ، لہذا یہ آسانی کے بغیر ، تیز رفتار سے اور کتنے ہی بے آواز سطح پر گھوم سکتا ہے۔
لیکن یہاں ایک کیچ ہے۔ مستقل مقناطیس کے بہاؤ کو برقی مقناطیسی جواب دینے کے ل magn ، مقناطیسی مرحلے یا کھمبے کی مستقل تبدیلی کی ضرورت ہوتی ہے ، تاکہ دونوں ہم منصب مستقل طور پر رد عمل کا مظاہرہ کرسکیں اور مخالف قوت کے ذریعہ آگے بڑھ سکیں اور اس طرح سے مطلوبہ جسم کو طاقت سے آزاد کریں۔ روٹر اور نتیجے میں torque کے ساتھ گردش پر عملدرآمد.
برش شدہ موٹر میں ، آریمیچر کنڈلی کی خود کو ایڈجسٹ کرنے والی نوعیت کی وجہ سے یہ آسان ہوجاتا ہے جو مقابل مقناطیسی قوت کو خود بخود گھومانے اور تخلیق کرنے میں کامیاب ہے اور بغیر کسی بیرونی دالوں یا پروسیسنگ کی ضرورت کے گھومتا رہتا ہے۔
تاہم ، بی ایل ڈی سی میں یہ ایک مسئلہ بن جاتا ہے چونکہ مقناطیس روٹر 'اشارہ' نہیں رہتا ہے اور اسے معنی خیز انداز میں گھومنے کے ل the ، بقیہ طریقے سے نہیں بلکہ گھومنے کے ل. سمت سے ایک مقناطیسی کمانڈ کی ضرورت ہوتی ہے۔
یہی وجہ ہے کہ تمام بی ایل ڈی سی موٹرز موٹر کے اندر سمیٹنے کے تین الگ الگ سیٹوں کی کمانڈ کرنے کے لئے لازمی طور پر موٹر ڈرائیور سرکٹ کی ضرورت ہوتی ہے۔
اس طرح تمام بی ایل ڈی سی لازمی طور پر 3 مرحلے کی موٹریں ہیں اور روٹر پر گردشی ٹارک تیار کرنے کے لئے لازمی طور پر 3 مراحل کی ضرورت ہوتی ہے۔
سینسر لیس بی ایل ڈی سی ڈرائیور کیا کرتا ہے
سینسر کم بی ایل ڈی سی ڈرائیور سرکٹ آسانی سے سمت والے 3 سیٹوں کو یکسر انداز میں برقی بناتا ہے کہ مقناطیسی روٹر مستقل مخالف قوت سے گزرنے کے قابل ہوجاتا ہے جس سے موٹر مستقل ٹورک اور گھماؤ طاقت کو پورا کرسکتا ہے۔
لیکن سرکٹ کے ذریعہ بی ایل ڈی سی سمیٹنے کی یہ نصابی طاقت صرف تصادفی طور پر طے نہیں کی جاسکتی ہے ، اس کو روکے ہوئے یا روٹر مقناطیس کی گھماؤ پوزیشن کے جواب میں ہونا پڑتا ہے ، ورنہ عمل درآمد ہوسکتا ہے اور ہم موٹر شافٹ (روٹر) کا مشاہدہ کرسکتے ہیں۔ ) ہاتھا پائی سے گھوم رہا ہے ، جو گھڑی کی سمت اور اینٹی کلاک ڈائی کے درمیان گھس رہا ہے جس میں کوئی سمجھدار گردش نہیں ہے۔
بی ایل ڈی سی موٹرز میں سینسر کیوں استعمال کیے جاتے ہیں
لہذا ، ہم بہت سارے بی ایل ڈی سی موٹر متغیرات کے اندر موجود سینسر متعارف کرواتے ہیں ، یہ سینسر (عام طور پر ہال اثر سینسر) روٹر مقناطیس کے مقناطیسی قطب کی بدلتی ہوئی پوزیشن کو 'سمجھتے ہیں' ، اسی سمیٹ کو بجلی سے چلانے اور گردش کی حرکت کو عملی جامہ پہنانے کے ل to منسلک پروسیسر سرکٹ کو ہدایت دیتے ہیں۔ ایک زیادہ سے زیادہ torque کے ساتھ.
ہال اثر سینسر زیادہ تر بی ایل ڈی سی موٹرز میں موثر انداز میں ملازمت کرتے ہیں جو سائز میں نسبتا larger بڑی ہوتی ہیں ، لیکن چھوٹے موٹرز جیسے سی پی یو کے پرستار ، سی پی یو ڈرائیوز ، ڈی وی ڈی پلیئرز ، چھوٹے راستہ پرستاروں میں ، کواڈکوپٹرز میں استعمال ہونے والی موٹرز کے لئے ، ہال اثر سینسر نامناسب ہو سکتے ہیں۔ اور اس ل an متبادل سینسر سے کم نقطہ نظر لاگو ہوتا ہے۔
اس میں سمیٹ کی موروثی بیک EMF بجلی کا استحصال شامل ہے جو موڑنے کے متعلقہ سیٹس کو بجلی سے چلانے اور گھومنے والی ٹارک کو عملی جامہ پہنانے کے لئے حوالہ ذریعہ کے طور پر لیا جاتا ہے۔

بی ایل ڈی سی روٹر موومنٹ کی نقالی
مذکورہ بالا خام تخروپن میں ہم تصور کرسکتے ہیں کہ کس طرح رہا ہوا واپس EMF کو حوالہ کے طور پر لیا جاتا ہے اور سمت لگنے والی دالوں کو سمیٹنے کے بعد کے سیٹوں کے لئے تیار کیا جاتا ہے ، مرکزی مستقل مقناطیس روٹر پر گھومنے والی ٹارک مسلط کرتے ہیں۔ نقلی شکل عین مطابق نقل نہیں ہوسکتی ہے ، اس کے باوجود یہ کام کرنے والے اصول کے بارے میں ایک موزوں خیال پیش کرتا ہے۔
یہ بات دلچسپ ہے کہ پلس تبدیل ہوجاتی ہے جب مقناطیس کا N / S بالکل سمیتا ہوا مرکز کے مرکز میں ہوتا ہے ، جو نبض کی قطعیت پر منحصر ہوتا ہے یا تو N یا S کی حیثیت سے متحرک ہوجاتا ہے اور اپنی طرف متوجہ اور پیچھے ہٹاتا ہے۔ N / S میگنےٹ پر زور دیں ، اس طرح زیادہ سے زیادہ ممکنہ سطح پر مطلوبہ torque پیدا کریں۔
اور اس کے نتیجے میں پچھلی سمیٹ کی سوئچنگ کے ذریعہ بیک EMF جاری ہونے کی وجہ سے ممکن ہوتا ہے۔
مذکورہ بالا گفتگو سینسر سے کم بی ایل ڈی سی موٹر کے کام کی وضاحت کرتی ہے ، اب آئیے سیکھیں کہ ایک مخصوص سرکٹ 3 مرحلے سوئچنگ کے مندرجہ بالا پیچیدہ عمل کو کس طرح سنبھالتا ہے
بی ایل ڈی سی ڈرائیور DRV10963
کچھ گوگلنگ کے بعد میں نے یہ سینسر لیس BLDC ڈرائیور سرکٹ ایک واحد چپ DRV10963 کا استعمال کرتے ہوئے پایا جو تشکیل میں کچھ حصوں کی نہ ہونے کے برابر ملازمت کرتا ہے اور اس کے باوجود مطلوبہ اقدامات کے لئے نفیس پروسیسنگ نافذ کرنے کے قابل ہے۔
DRV10963 ایک جدید ترین چپ ہے جو خاص طور پر صرف موٹر سمیٹ سے پیچھے EMF کی توقع کرتے ہوئے اور سمیٹ پر ایک عین مطابق کمانڈ پیش کرتے ہوئے اور روٹر پر زیادہ سے زیادہ گھومنے والی ٹورک کی تکمیل کرکے سینسر کم بی ایل ڈی سی موٹرز کو چلانے کے لئے ڈیزائن کیا گیا ہے۔
سرکٹ ڈایاگرام

مذکورہ بالا شبیہہ سرکٹ کی سادہ ترتیب کو ظاہر کرتی ہے جس میں بظاہر آئی سی کے علاوہ کچھ نہیں ہے۔
کسی خاص بیرونی ذریعہ سے مخصوص ڈاٹا کے ساتھ متعلقہ پن آؤٹ کو صرف کھلانے کے ذریعہ مختلف کاموں کو مختص کیا جاتا ہے جیسے موٹر کا PWM اسپیڈ کنٹرول ، سمت کنٹرول ، وغیرہ۔
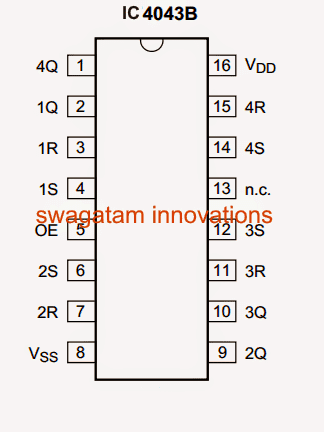
مندرجہ ذیل تصویر میں چپ کا پیکیج دکھایا گیا ہے ، جو 10 پن DIL آای سی کی طرح دکھتا ہے ، اسی طرح کے مختلف پن آؤٹ افعال کو اس اعداد و شمار سے مطالعہ کیا جاسکتا ہے جس میں خاکہ کے تحت پیش کیا گیا ہے:

مجوزہ سینسر لیس BLDC ڈرائیور سرکٹ کے سرکٹ ڈایاگرام کا حوالہ دیتے ہوئے جیسا کہ پچھلے آرٹیکل میں بھی پیش کیا گیا ہے اور اوپر چپ امیج بھی ، پن آؤٹ تفصیلات مندرجہ ذیل طور پر سمجھی جاسکتی ہیں:
آئی سی پن آؤٹ تفصیلات
ایف جی = یہ موٹر اسپیڈ انڈیکیٹر پن (آؤٹ پٹ) ہے ، جس کو اندرونی بی جے ٹی کے ساتھ کھلی کلکٹر موڈ میں دھاندلی کی جاتی ہے۔
اوپن کلیکٹر نے اشارہ کیا کہ اس پن آؤٹ میں آؤٹ پٹ کھلی کلکٹر اور گراؤنڈ میں ڈوبنے والے منطق کے ذریعہ منفی پی ڈبلیو ایم تیار کرے گا ، اس طرح درست پڑھنے کے ل to صارف کو اس کھلی کلکٹر اور پل سپوٹنگ (5V) میں پل اپ ریزٹر سے مربوط کرنے کی ضرورت ہوگی۔ ) اس پن آؤٹ پر تیز رفتار اشارے کو پورا کرنے کے ل۔
ایف جی ایس = یہ اسپیڈ انڈیکیٹر سلیکٹر ان پٹ ہے ، جس کا مطلب اشارے پن ایف جی کو آن / آف سوئچ کرنے کے لئے یہاں ایک منطق اونچی یا کم ہو سکتی ہے۔
وی سی سی = آئی سی کو چلانے کے قابل بنانے کے ل The مثبت فراہمی ، 5V سے زیادہ نہیں ہونی چاہئے۔
ڈبلیو ، یو اور وی بی ایل ڈی سی موٹر کے 3 مرحلے کی آؤٹ پٹ ہیں جو اس آئی سی کے ذریعہ چلائے جانے والے ہیں۔ یہ موٹر کنڈلیوں کی مطابقت پذیری سوئچنگ کے ل motor موٹر EMF دالوں کو سینسنگ کرنے کے آدانوں کی طرح بھی کام کرتا ہے۔
GND = Vdd پن کے سلسلے میں آئی سی کے منفی سپلائی پن آؤٹ کا حوالہ دیتا ہے۔
ایف آر = موٹر کی سمت کو منتخب کرنے یا کمانڈ کرنے میں مدد کرتا ہے اور ایک بار سسٹم کے چلنے کے بعد ، کسی بیرونی منطق کو اعلی یا منطق کم کی نشاندہی کرکے متحرک طور پر تبدیل کیا جاسکتا ہے۔
PWM = یہ ایک سے PWM کنٹرول ان پٹ کی علامت ہے بیرونی PWM ویوفورم جنریٹر
یہ پی ڈبلیو ایم ان پٹ متصل بی ایل ڈی سی موٹر کے مطلوبہ اسپیڈ کنٹرول پر عمل درآمد کے لئے متغیر ہوسکتا ہے۔
چپ کے مرکز میں بندیدار جگہ تھرمل پیڈ کی نشاندہی کرتی ہے ، جسے چپ پر گرمی کی ممکنہ نسل کو ڈوبنے کے ل cla اس پر کٹھن لگایا جاتا ہے یا اسے ہیٹ سنک سے دبایا جاسکتا ہے جبکہ اس کا استعمال بھری ہوئی بی ایل ڈی سی موٹر کے ساتھ ہوتا ہے۔
مذکورہ بالا بحث سینسر لیس BLDC موٹر ڈرائیور چپ DRV10963 کی پن آؤٹ یا کنکشن کی تفصیلات بتاتی ہے ، اب آئیے مندرجہ ذیل نکات کی مدد سے چپ کی اندرونی ترتیب اور کام کا تفصیل سے جائزہ لیں:
ڈیوائس کی تفصیل
DRV10963 ایک 3 مرحلہ سینسر لیس الیکٹرک موٹر آپریٹر ہے جس میں بلٹ ان پاور MOSFETs (3 مرحلے H- پل) ہے۔ یہ اعلی پیداوری ، کم شور اور کم سے کم ثانوی مواد کی گنتی موٹر ڈرائیو کے افعال کے لئے تیار کیا گیا ہے۔ خصوصی سینسر لیس ونڈو-آئیس 180 ° سینوسائڈیل انتظامی انتظام اسکیم شور سے پاک موٹر سفر کی کارکردگی فراہم کرتی ہے۔
DRV10963 ایک زبردست تالا پتہ لگانے کی فعالیت سے بنا ہوا ہے ، جس میں ضمنی طور پر اندر بلٹ سیکیورٹی سرکٹس کے ساتھ مل کر محفوظ کارکردگی کو حاصل کیا جاسکتا ہے۔ DRV10963 ایک بے نقاب تھرمل چٹائی کے ساتھ حرارتی طور پر موثر 10- پن USON پیکنگ میں پایا جاسکتا ہے۔
آایسی کیسے کام کرتی ہے
DRV10963 پروڈکٹ ایک 3 مرحلہ سینسر لیس موٹر آپریٹر ہے جس میں طاقت سے موسفٹس ہیں ، یہ ہے
اعلی کارکردگی ، کم گونج اور کم سے کم سطحی حصہ گنتی موٹر ڈرائیو کے افعال کے لئے خاص طور پر تخلیق کیا گیا ہے۔
پرنسپل سینسر لیس ونڈو سے کم 180 ° سینوسائڈیل کنٹرول پلان بجلی کے ذریعہ محرک ٹورک لہر کو برائے نام برقرار رکھتے ہوئے بے محل موٹر کا کام پیش کرتا ہے۔ شروعات کے بعد ، DRV10963 ڈیوائس ایف آر ان پٹ پن کے ذریعے مخصوص کورس میں موٹر کو موڑنے جا رہی ہے۔
DRV10963 چپ سائنوسائڈل کنٹرول پلان کو استعمال کرتے ہوئے 3 مرحلے کے BLDC موٹر پر کام کرنے جارہی ہے۔
ملازمت والے سائنوسائڈل مرحلے کے وولٹیج کی اہمیت PWM پن کے ڈیوٹی سائیکل پر منحصر ہے۔ موٹر چلتے چلتے ، DRV10963 IC رفتار کا ڈیٹا ایف جی پن پر فراہم کرتا ہے۔
DRV10963 یونٹ سمارٹ لاک سینس کی صلاحیت پر مشتمل ہے۔ اس طرح کی صورت میں جس میں موٹر کسی بے حد دباؤ سے دب گیا ہو ، پروگرام لاکنگ کی دشواری کی نشاندہی کرنے جارہا ہے اور موٹر کے ساتھ ہی اپنی حفاظت سے متعلق اقدامات اٹھائے گا۔
لاک سینس سرکٹ کے خاص طریقہ کار کو لاک سراغ میں تفصیل سے دکھایا گیا ہے۔ اس کے علاوہ DRV10963 آایسی میں موجودہ حفاظت سے زیادہ ، وولٹیج کے تحفظ سے زیادہ ، وولٹیج کے تحفظ کے تحت ، اور درجہ حرارت سے زیادہ تحفظ کے ل multiple مثال کے طور پر ایک سے زیادہ اندرونی حفاظتی سرکٹس شامل ہیں۔
خصوصیت کی وضاحت
اسپیڈ ان پٹ اور کنٹرول
DRV10963 3 مرحلہ 25-kl-lz PWM آؤٹ پٹ پیش کرتا ہے جس میں ایک مرحلے سے مرحلے تک سائنوسائڈل ویوفارمز کی معیاری فیصد ہوسکتی ہے۔ اگر کسی بھی سائیکل کو زمین کے حوالے سے تعی .ن کیا جاتا ہے تو ، معلوم کیا جاتا ہے کہ طول و عرض کا امکان PWM سے محفوظ سینوسائڈ ہے جو 3 آرڈر ہارمونکس کے ساتھ مل کر شکل 2 میں دکھایا گیا ہے۔

کوڈنگ کی یہ حکمت عملی ڈرائیور کی خصوصیات کو اس وجہ سے ہموار کرتی ہے کہ شاید اکثر ایک مرحلے کی پیداوار ہوگی جو صفر کے برابر ہوسکتی ہے۔
سپلائی وولٹیج (وی سی سی) اور مینڈیٹ پی ڈبلیو ایم ڈیوٹی سائیکل (پی ڈبلیو ایم) کے مطابق نتیجہ طول و عرض مختلف ہوتا ہے جیسا کہ مساوات 1 میں بیان کیا گیا ہے اور شکل 3 میں روشنی ڈالی گئی ہے۔ ایک بار ہدایت نامہ پی ڈبلیو ایم ڈیوٹی سائیکل 100 پریکٹینٹ ہونے کے بعد زیادہ سے زیادہ طول و عرض نافذ کیا جاتا ہے۔
Vphpk = PWMdc>

موٹر کی رفتار کا استعمال PWM آرڈر کے ذریعے براہ راست نہیں کیا جاتا ہے تاکہ موٹر کے لئے استعمال ہونے والے مرحلے کے وولٹیج کے طول و عرض کو باقاعدہ کرسکیں۔
پی ڈبلیو ایم ان پٹ کے ڈیوٹی سائیکل کو 9 بٹ ڈیجیٹل مقدار (0 سے 511 تک) میں تبدیل کیا گیا ہے۔
ضابطے کی قرارداد 1/512 == 0.2٪ ہے۔ ڈیوٹی سائیکل تجزیہ کار ان پٹ ڈیوٹی سائیکل اور 9 بٹس ڈیجیٹل فگر کے مابین ابتدائی آرڈر ایکسچینج آپریشن کی سہولت فراہم کرتا ہے۔
یہ شکل 4 میں روشنی ڈالی گئی ہے ، جس میں r = 80 ایم ایس ہے۔

آؤٹ پٹ زیادہ سے زیادہ طول و عرض کے ساتھ پی ڈبلیو ایم آرڈرڈ ڈیوٹی سائیکل کے مابین تبادلہ کارکردگی DRV10963 ڈیوائس میں متغیر ہے۔
PWM کمانڈ> کم سے کم کام کرنے والے ڈیوٹی سائیکل پر جب نتیجہ زیادہ سے زیادہ طول و عرض پر مساوات 1 کے ذریعہ بحث کی جاتی ہے اوپی ٹی ترتیب (MINOP_DC1: 0) کے ذریعہ سب سے کم آپریشن ڈیوٹی سائیکل اکثر ممکنہ طور پر 13٪ ، 10٪ ، 5٪ یا کسی پابندی پر قائم ہوتا ہے۔
ٹیبل 1 کم سے کم آپریشن ڈیوٹی سائیکل کے ل for تجویز کردہ تشکیلات کا مظاہرہ کرتا ہے۔
جب بھی پی ڈبلیو ایم کے ہدایت کردہ ڈیوٹی سائیکل کم ترین کام کرنے والے ڈیوٹی سائیکل سے کم اور 1.5 فیصد سے بھی زیادہ ہوتا ہے تو ، کم سے کم آپریٹنگ ڈیوٹی سائیکل پر آؤٹ پٹ کو منظم کیا جاسکتا ہے۔ جب بھی ان پٹ ڈیوٹی سائیکل 1.5 فیصد سے کم ہو ، DRV10963 آلہ آؤٹ پٹ کو نہیں چلائے گا ، اور اسے اسٹینڈ بائی موڈ میں بھیجا جاتا ہے۔
تصویر 6 میں اس کی مثال دی جاسکتی ہے۔

گھماؤ ترتیب
DRV10963 موٹر کو کسی تکنیک کے ذریعہ شروع کرے گی جس کی تفصیل شکل 7 میں دی گئی ہے۔

موٹر ابتدائی گراف میں لوپ چینج کی حد (HOW.) کو بند کرنے ، ٹائم سیدھ (TAHQH) ، اور ایکسلٹریٹ ریٹ (RACE) کے لئے اوپن لوپ کے ل device آلے کے قابل ترتیب متبادلات پر مشتمل ہے۔
سفر کی منطق کے مطابق روٹر کی قطار لگانے کیلئے ، DRV10963 ایک ہی وقت میں GND میں کنٹرول مرحلے U پر ایک ہی وقت میں V اور W پر x٪ ڈیوٹی سائیکل چلاutes۔
یہ منظر TAIign سیکنڈ تک برقرار ہے۔ ایکس سی اہمیت کی نشاندہی وی سی سی وولٹیج کے ذریعہ کی گئی ہے (جیسا کہ ٹیبل 2 میں دکھایا گیا ہے) تاکہ مختلف مختلف سپلائی وولٹیجز پر کافی گھومنے والی ٹورک کو برقرار رکھا جاسکے۔
جیسا کہ سیدھا تسلسل پورا ہوتا ہے ، موٹر کو جدول 2 میں بیان کردہ چوٹی کی سطح کے ساتھ سینوسائڈیل مرحلے کے وولٹیجز لگا کر رفتار کو تیز کرنے پر مجبور کیا جاتا ہے اور RACE کے ذریعہ تجارتی حد اطلاق کو بڑھاوا دینے کی شرح سے بڑھایا جاتا ہے جب تک کہ حمل کی سطح بڑھ نہیں جاتی ہے . ، ہرٹج
جیسے ہی یہ حد آتی ہے ، DRV'l0963 بند لوپ موڈ میں تبدیل ہوجاتا ہے جس کے تحت کموٹیشن ڈرائیو کی پیشرفت کو بلٹ کنٹرول الگوریتم کے ذریعہ تسلیم کیا جاتا ہے جبکہ ملازم وولٹیج کی شناخت پی ڈبلیو ایم مینڈیٹ ڈیوٹی سائیکل ان پٹ سے ہوتی ہے۔
او پی پی کی تشکیل کے ذریعہ لوپ ٹرانس اوور کی حد (ہوم) ، سیدھ کا وقت (TAHQH) ، اور ایکسلریٹ ریٹ (RACE) کو بند کرنے کے لئے کھلی لوپ ترتیب دی جاتی ہے۔
ہینڈ آف چوک (HOW،) کا انتخاب عام طور پر آزمائشی اور غلطی کی تشخیص کے ذریعہ منظور کیا جاتا ہے۔ مقصد یہ ہوگا کہ ہینڈ آف رواداری کو ترجیح دی جائے جو ممکن حد تک کم ہو اور موٹر کو کھلی لوپ ایکسلریشن اور بند لوپ ایکسلریشن کے مابین آسانی اور وفاداری سے تبدیلی کے قابل بنائے۔
عام طور پر بڑھتی ہوئی اسپیڈ موٹرز (زیادہ سے زیادہ رفتار) کی وجہ یہ ہے کہ تیز رفتار موٹرز کے ٹی میں کمی واقع ہونے کی وجہ سے اعلی ہینڈ آف رواداری کی ضرورت ہوتی ہے لہذا اس میں زیادہ سستی بی ای ایم ایف کی کمی واقع ہوتی ہے۔
جدول 3 ہینڈ آف رواداری کے لئے قابل ترجیحی ترجیحات کا مظاہرہ کرتا ہے۔ بجلی کی ہرٹج میں سب سے زیادہ رفتار ایک مخصوص جمع کرانے کے لئے مطلوبہ ہینڈ آف اسپیڈ کا انتخاب کرنے میں مدد کرنے کے لئے ایک حوالہ کے طور پر ثابت ہوتی ہے۔

سیدھے وقت (TAHQH) اور ایکسلریٹ ریٹ (RACE) کا انتخاب بھی مقدمے کی سماعت اور غلطی کی جانچ پڑتال پر دستہ ہوسکتا ہے۔
زیادہ جڑتا رکھنے والی موٹرس عام طور پر ایک تیز تیز رفتار فیصد کے ساتھ مل کر ایک تیز رفتار تیز رفتار فیصد کے ساتھ مل کر کم جڑتا والی موٹروں کے برعکس ایک بڑھا ہوا سیدھ وقت اور زیادہ سست رفتار کی شرح کا مطالبہ کرتی ہیں۔ پروگرام ٹریڈ آفس کو لانچ استحکام کو فائدہ اٹھانے کے لئے نافذ کرنے کی ضرورت ہے جیسا کہ دورانیہ کو گھومنے کے برعکس ہے۔
TI زیادہ سے زیادہ تکمیل کی شرح کی حمایت میں ٹارک اپ وقت پر سمجھوتہ کرنے کے لئے کم شدید کنفیگریشنوں (سست RACE اور اہم Tmign) کے بارے میں فیصلہ کرنے کے ساتھ شروع کرتا ہے۔
جیسے ہی آلات کی ایمانداری سے کارکردگی کا مظاہرہ کرنے کی تصدیق ہوجائے اضافی طاقتور تشکیلات (زیادہ تر RACC اور کم TAHQH) کو موڑ کو کم کرنے اور اسی وقت احتیاط سے تکمیل کی شرح کو ٹریک کرتے ہوئے استعمال کیا جاسکتا ہے۔
ٹیبل 4 TA'g ، اور RACE کے لئے قابل ترتیب ترتیبات کی نمائش کرتا ہے۔

اس سینسر لیس BLDC IC کے بارے میں وضاحت کا باقی حصہ پیش کیا گیا ہے اس اصل ڈیٹاشیٹ میں
براہ کرم مذکورہ بالا بحث شدہ سینسر لیس بی ایل ڈی سی موٹر ڈرائیور سرکٹ کی تفصیلات کے بارے میں مزید جاننے کے لئے بلا جھجھک تبصرہ کریں
پچھلا: 12V ایل ای ڈی بیگ بجلی سپلائی سرکٹ اگلا: ایم سی یو کے بغیر کواڈ کوپٹر ریموٹ کنٹرول سرکٹ