
کمپیوٹنگ میں ، نظام گفتگو کی معلومات کے دو الگ الگ حصوں میں CAN انٹرفیس مشترکہ حد ہوسکتی ہے۔ یہ گفتگو کمپیوٹر ہارڈویئر ، سافٹ وئیر ، انسانوں ، پردیی آلات اور ان کے مجموعے کے مابین کی جاسکتی ہے۔ ٹچ اسکرین جیسے کمپیوٹر کے کچھ ہارڈ ویئر ڈیوائسز کیونکہ ایک ٹچ اسکرین معلومات کو شیئر اور حاصل کرسکتی ہے انٹرفیس کے ذریعے ، جبکہ دوسرے آلات جیسے مائکروفون ، ماؤس صرف ایک ہی راستہ ہے۔ انٹرفیس بنیادی طور پر دو اقسام میں ہیں جیسے ہارڈویئر انٹرفیسنگ اور سافٹ ویئر انٹرفیسنگ۔ ہارڈویئر انٹرفیس بہت سارے آلات جیسے ان پٹ ، آؤٹ پٹ ڈیوائسز ، بسوں اور اسٹوریج ڈیوائسز میں استعمال ہوتا ہے۔ اس CAN انٹرفیس کی وضاحت منطق کے اشاروں سے کی جا سکتی ہے۔ ایک سافٹ ویئر انٹرفیس مختلف سطحوں پر ایک وسیع رینج میں دستیاب ہوسکتا ہے۔ ایک OS ہارڈ ویئر کے مختلف حصوں کے ساتھ انٹرفیس کرسکتا ہے۔ پر پروگرام یا ایپلی کیشنز OS کو بات چیت کرنے کی ضرورت ہوسکتی ہے نہروں اور آبجیکٹ پر مبنی پروگرامنگ میں ، کسی بھی درخواست میں موجود اشیاء کو طریقوں کے ذریعے بات چیت کرنے کی ضرورت ہوتی ہے۔

بس کر سکتے ہیں
CAN بس سن 1983 میں رابرٹ بوش GmbH میں تیار کی گئی تھی۔ یہ پروٹوکول سال 1986 میں ڈیٹرائٹ ، مشی گن میں واقع SAE کانگریس (سوسائٹی آف آٹوموبائل انجینئرز) میں جاری کیا گیا تھا۔ پہلہ پروٹوکول کر سکتے ہیں فلپس اور انٹیل کے ذریعہ تیار کیا گیا تھا اور سال 1987 میں مارکیٹ میں ریلیز ہوا تھا۔ لیکن BMW سیریز-8 پہلی گاڑی تھی جس نے CAN پروٹوکول پر مبنی ملٹی پلیکس وائرنگ سسٹم کو نمایاں کیا۔

بس کر سکتے ہیں
کی مکمل شکل CAN ایک کنٹرولر ایریا نیٹ ورک ہے . یہ ایک قسم کی گاڑی بس ہے جو بنیادی طور پر مختلف کو اجازت دینے کے لئے ڈیزائن کی گئی ہے آلات اور مائکروکونٹرولر ایک میزبان کمپیوٹر کے بغیر ایک دوسرے کے ساتھ بات چیت کرنے کے لئے. یہ پروٹوکول ایک پیغام پر مبنی ہے اور بنیادی طور پر آٹوموبائل میں برقی وائرنگ کے لئے ڈیزائن کیا گیا ہے۔ بوش نے CAN کے مختلف ورژن شائع کیے اور سال 1991 میں تازہ ترین CAN 2.0 شائع ہوا۔
CAN دو حصوں پر مشتمل ہے جیسے بنیادی طور پر حصہ A اور پارٹ B جہاں ، حصہ A 11 بٹ شناخت کنندہ ہے اور یہ معیاری شکل میں ہے۔ حصہ بی ایک 29 بٹ شناخت کنندہ ہے ، اور یہ توسیعی شکل میں ہے۔ ایک CAN جو 11 بٹ شناخت کنندگان کو استعمال کرتی ہے اسے اے این 2.0 اے کہا جاتا ہے اور ایسا کین جو 29 بٹ شناخت کار استعمال کرتا ہے اسے CAN 2.0B کہا جاتا ہے۔
CAN کو USB میں انٹرفیسنگ
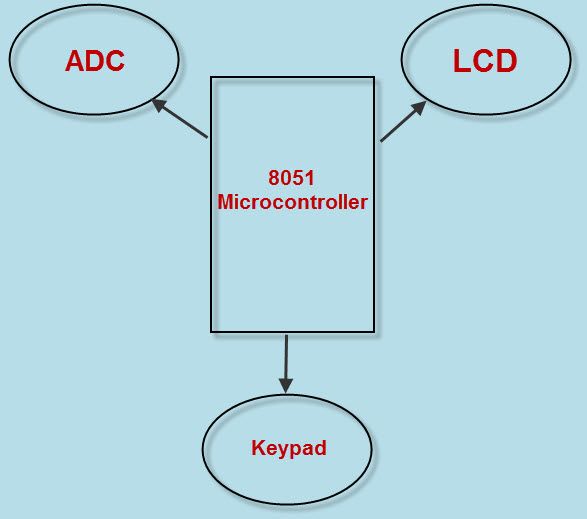
CAN کو USB میں انٹرفیس کرنا ایک آسان آلہ ہے ، جو CAN بس کی نگرانی کے لئے استعمال ہوتا ہے۔ یہ آلہ NUC140LC1CN 32 K Cortexes-M0 مائکرو پروسیسر کا استعمال کرتا ہے۔ اس میں CAN اور USB دونوں ہی پیری فیرلز ہیں۔
انٹرفیسنگ CAN سے USB کی اہم خصوصیات ہیں
- یہ ڈیزائن کرنا بہت آسان ہے
- کے ساتھ اچھی طرح سے ملاپ کیا پروٹوکول لاوکیل کینسوب
- خود کو FTDI USB جیسے ڈیوائس کے طور پر بے نقاب کرنا
- یہ CAN 2.0B 29 بٹ اور CAN 2.0A 11 بٹ فریم کی حمایت کرتا ہے
- یہ اندرونی میسج بفر (FIFO CAN) پر مشتمل ہے
- یہ USB پورٹ سے پاور کرتا ہے
- فرم ویئر اپ ڈیٹس کے لئے بڑے پیمانے پر اسٹوریج ڈیوائس (فلیش-رہائشی USB) استعمال ہوتا ہے
اسکیمیٹک ڈایاگرام
CAN سے USB میں انٹرفیسنگ کی سرکٹ تشکیل ذیل میں دکھائی گئی ہے۔ CU ٹرانسفارمر NUC140 CAN آلہ کو CAN بس کے ساتھ بات چیت کرنے کے قابل بنانے کے لئے استعمال کیا جاتا ہے۔ چپ TJA1051T NXP سے مقصد کو حل کرتا ہے۔ مائکرو پروسیسر NUC140 5V بجلی کی فراہمی کے ساتھ کام کرنے کی صلاحیت رکھتا ہے جہاں اضافی 3.3V وولٹیج ریگولیٹر کی ضرورت نہیں ہے۔ یہ آسان بندوبست CAN to USB انٹرفیس پر عمل درآمد کرنے کا ایک آسان کام کرتا ہے۔

اسکیمیٹک ڈایاگرام
سرکٹ تین اسٹیٹس ایل ای ڈی یعنی D1 ، D2 اور D3 کے ساتھ بنایا گیا ہے۔
- یہاں D1 ڈایڈڈ کی حیثیت بتاتی ہے کہ USB میزبان سے منسلک ہے
- یہاں D2 ڈایڈڈ کی حیثیت کا کہنا ہے کہ CAN بس کی سرگرمی ہے
- CAN بس کی غلطیوں کا اشارہ D3 ڈایڈڈ سے کیا جاسکتا ہے
NUC140 مائکرو پروسیسر میں مربوط بوٹ لوڈر نہیں ہے اور پروگرام کا بہترین طریقہ صرف نووٹن ICP پروگرامر اور استعمال ہوتا ہے بازو ایس ڈبلیو ڈی (سیریل وائر ڈیبگ) انٹرفیس۔ اگر بوٹ لوڈر کو پہلے کسی پروگرام کے ساتھ پھینک دیا گیا ہو تو اس کی وجہ سے اس کا آغاز ہوسکتا ہے۔ انٹرفیس کو طاقت سے پہلے جے پی 1 کو مربوط کرنے سے بوٹ لوڈر کو متحرک کیا جائے گا۔
بوٹ لوڈر
NUC140LC1 مائکرو پروسیسر کی فلیش میموری کو دو حصوں میں الگ کیا گیا ہے۔ وہ صارف پروگرام کوڈ اور بوٹ لوڈر کو انجام دے رہے ہیں۔ بوٹ لوڈر اور عملدرآمد کرنے والے صارف پروگرام کا سائز 4K اور 32K ہے۔ یہاں نووٹن سے بڑے پیمانے پر اسٹوریج ڈیوائس (MSD) بوٹ لوڈر مکمل طور پر فعال USB بوٹ لوڈر بنانے کے لئے استعمال ہوتا ہے۔ JP1 جمپر کو جوڑ کر بوٹ لوڈر چالو ہوجائے گا۔ لہذا ، آخر میں ، ہٹنے والا ڈرائیو 32KB سائز کے میزبان فائل سسٹم میں نظر آنا چاہئے۔ بس بوٹ لوڈر ڈرائیو پر USB فرم ویئر سے CAN کی تازہ کاری کو کاپی اور پیسٹ کریں۔ USB کیبل منقطع کریں ، جمپر کو منقطع کریں اور اسے دوبارہ پلگ ان کریں۔ نئے فرم ویئر کی تازہ کاری اب چلنی چاہئے۔

بوٹ لوڈر
USB انٹرفیس پروگرامنگ اور نیو ٹینی SDK-140 پر جا سکتے ہیں
مائکرو پروسیسر کا پروگرامنگ NUC140 کو نووٹن ICP پروگرامنگ ایپلی کیشن اور نووٹن کا نیو لنک پروگرامر درکار ہے۔ لیکن یہاں ڈیجی کلید سے نیو ٹینی-ایس ڈی کے 140 (NUC140 ڈیمو بورڈ) دستیاب ہے۔ یہ دو حصوں پر مشتمل ہے جیسے نیو لنک پروگرامرز اور NUC140 چپ والا حصہ۔ اس بورڈ کو نو لنک کے حصے کو الگ کرنے کے لئے بھی سوراخ کیا گیا ہے۔ دراصل ، آپ اس آلے کو NUC140 ڈیمو بورڈ کے گرد خصوصی طور پر ڈیزائن کرسکتے ہیں ، صرف ایک اضافی CAN ٹرانسیور چپ ضروری ہوگی۔

NUC140 بورڈ
لہذا ، یہ سب کچھ USB کے ساتھ CAN انٹرفیس ، CAN بس ، USB کو CAN انٹرفیس کرنے ، اسکیمیٹک آریگرام ، بوٹ لوڈر اور NUC140 مائکرو پروسیسر۔ ہم امید کرتے ہیں کہ آپ کو اس تصور کی بہتر تفہیم ملی ہے۔ مزید برآں ، اس مضمون سے متعلق کوئ سوالات براہ کرم ذیل میں تبصرہ سیکشن میں تبصرہ کرکے اپنی قیمتی تجاویز دیں۔ آپ کے لئے ایک سوال یہ ہے کہ ، CAN انٹرفیس کی درخواستیں کیا ہیں؟
تصویر کے کریڈٹ:









{kind=link}
{kind=link}
{kind=link}