پوسٹ میں ہال اثر سینسر نیٹ ورک کے ذریعہ RPM آراء سگنل لوپ کا استعمال کرتے ہوئے الیکٹرانک انجن اسپیڈ گورنر یا کنٹرولر سرکٹ پر تبادلہ خیال کیا گیا ہے۔ اس خیال کی درخواست مسٹر ایمسا ناگا نے کی تھی۔
سرکٹ کے مقاصد اور تقاضے
- آپ کے وقت کا بہت بہت شکریہ۔ مجھے یقین ہے کہ یہ سرکٹ ایک ہی مرحلے کی فراہمی کے لئے موزوں ہوگا۔ میرا الٹرنیٹر 3 مرحلہ 7KvA ہے اور میں اس کو ڈیزل گاڑی کے انجن کے ساتھ جوڑنا چاہتا ہوں جس میں تیز رفتار گورنر کے بدلے میں ایکسیلیٹر ہوتا ہے۔
- میں جو نافذ کرنا چاہتا ہوں وہ ہے۔ ایک 'الیکٹرانک انجن اسپیڈ گورنر' جس میں شاید الیکٹرانک امدادی کنٹرول کا طریقہ کار ہوتا جیسے ایک اسپیڈ سینسر سرکٹ (انجن آر پی ایم سینسر) سرعت موٹر چلانے کے ل the تیز رفتار میکانزم کو برقرار رکھنے کے ل would متبادل کے لئے لاگو بوجھ کے سلسلے میں انجن کی مستقل رفتار۔
- اس سے تعدد کو برقرار رکھنے اور جنریٹر کی وولٹیج کو برقرار رکھنے میں مدد ملے گی۔ میں مکینیکل پہلو کا خیال رکھنے کے اہل ہوں گے ، اگر آپ براہ کرم سرومو موٹر کو اس طرح سے کنٹرول کرنے کے لئے ایک سرکٹ تیار کریں تاکہ انجن RPM میں تبدیلی کے سلسلے میں یہ کسی بھی سمت کا رخ کیا جاسکے۔ امید میں بہت بہت شکریہ۔
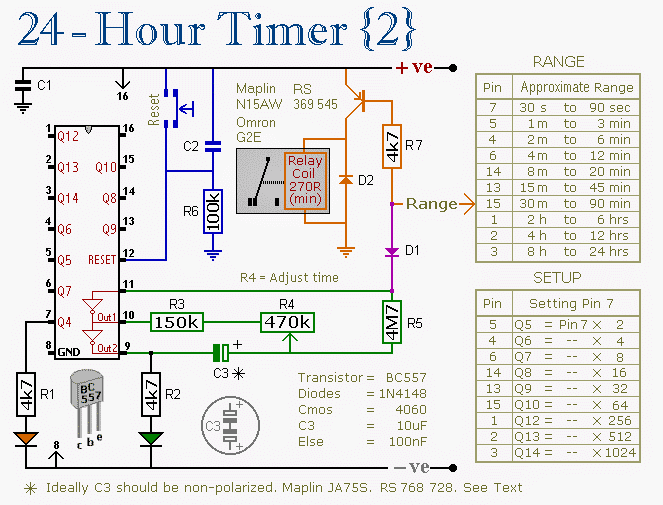
سرکٹ ڈایاگرام

نوٹ: موٹر کو ایک 12 V اسپرینگ بھری سوفناڈ کے ساتھ تبدیل کیا جانا چاہئے
ڈیزائن
ڈیزل انجن اسپیڈ گورنر یا کنٹرولر کا سرکٹ فیڈ بیک RPM پروسیسر یا a کا استعمال کرتے ہوئے مذکورہ اعداد و شمار میں دیکھا جاسکتا ہے ٹیکومیٹر سرکٹ
بائیں طرف IC1 555 مرحلے میں ایک سادہ ٹیکومیٹر سرکٹ تشکیل دیا گیا ہے جو ایک کے ساتھ تشکیل دیا گیا ہے ہال اثر سینسر اس کے RPM کی شرح کو بہتر بنانے کے ل the انجن کے بوجھ کے ساتھ منسلک۔
آر پی ایم متناسب طور پر مختلف نبض کی شرح یا تعدد میں تبدیل ہوتا ہے اور آئی سی 1 کے پن نمبر 2 کو ٹوگل کرنے کے لئے بی جے ٹی کی بنیاد پر لاگو ہوتا ہے۔
سرکٹ آپریشن
آئی سی 1 کو بنیادی طور پر مونوسٹیبل وضع میں دھاندلی کی جاتی ہے جس کی وجہ سے اس کی پیداوار متناسب طور پر آن / آف سوئچنگ ایڈجسٹ کرنے کا باعث بنتی ہے ، جس کی مدت دکھایا ہوا 1 ایم برتن استعمال کرکے طے ہوتی ہے۔
آر سی 1 سے حاصل کردہ آؤٹ پٹ جس میں آر پی ایم کے مواد کی شکل میں توسیع شدہ وقت کی دالیں شامل ہیں مناسب طور پر انٹیگریٹر مرحلے سے کافی حد تک آسانی سے نکالا جاتا ہے جس میں ریسٹر 1 کے ، 10 کے اور 22 یو ایف کے استعمال سے کچھ جوڑے پر مشتمل ہوتا ہے۔ 2.2uF کپیسیٹرز۔
یہ مرحلہ monostable کے کھردرا RPM ڈیٹا کو مناسب آسانی سے مختلف یا تیزی سے مختلف ہوتی وولٹیج میں تبدیل کرتا ہے۔
حیرت انگیز طور پر مختلف ہوتی ہوئی وولٹیج کو اگلے IC2 555 مرحلے کے پن # 5 کے ساتھ منسلک دیکھا جاسکتا ہے جو حیرت انگیز سرکٹ کے طور پر تشکیل دیا گیا ہے۔
اس حیرت انگیز کا کام عام آپریٹنگ حالات میں پن # 3 پر انتہائی تنگ یا کم پی ڈبلیو ایم آؤٹ پٹ تیار کرنا ہے۔
یہاں عام آپریٹنگ حالت اس صورتحال سے مراد ہے جب حواس باختہ RPM متعین حد کے اندر ہوتا ہے اور IC2 کا پن # 5 امیٹر پیروکار سے کوئی وولٹیج ان پٹ نہیں ملتا ہے۔ اس کم پی ڈبلیو ایم آؤٹ پٹ کو دو 100 ک مزاحمت کاروں اور آئی سی 2 پن # 6/2 اور پن # 7 کے ساتھ وابستہ 1 یو ایف کاپاکیٹر کو مناسب طریقے سے ایڈجسٹ کرکے لاگو کیا جاسکتا ہے۔
آئی سی 2 کے پن نمبر 3 سے آنے والا یہ کم پی ڈبلیو ایم TIP122 کو کافی سخت سوئچ کرنے میں قاصر ہے اور اسی لئے اشارہ شدہ موٹر وہیل اسمبلی مطلوبہ رفتار حاصل کرنے میں ناکام ہے اور اسی وجہ سے غیر فعال رہتی ہے۔
تاہم ، جیسے ہی آر پی ایم میں اضافہ شروع ہوتا ہے ٹیکومیٹر تیزی سے زیادہ وولٹیج تیار کرنا شروع کرتا ہے جس کے نتیجے میں آئی سی 2 کے پن # 5 پر متناسب طور پر بڑھتی ہوئی وولٹیج کا سبب بنتا ہے۔
اس کے نتیجے میں ٹی آئی پی 122 کو زیادہ سخت طریقے سے چلانے کی اجازت ملتی ہے ، اور منسلک موٹر کو کافی ٹارک حاصل کرنے کی اجازت ملتی ہے ، تاکہ اس سے منسلک ایکسلریٹر پیڈل کو دبانے والے موڈ کی طرف دبانے لگے۔
یہ طریقہ کار ڈیزل انجن کو اپنی رفتار کو کم کرنے پر مجبور کرتا ہے ، جس کے نتیجے میں ٹیکومیٹر اور پی ڈبلیو ایم کے مراحل اپنی اصل حالت میں بحال ہوجاتے ہیں ، اور ڈیزل موٹر کے ل the مطلوبہ کنٹرول کی رفتار کو نافذ کرتے ہیں۔
دکھائے جانے والے ایکسیلیٹر موٹر انتظامات کے بجائے ، TIP122 کے جمعکار کو متبادل کے ساتھ وائرڈ کیا جاسکتا ہے سی ڈی آئی یونٹ ٹھوس ریاست کی سہولت فراہم کرنے اور تبادلہ خیال شدہ الیکٹرانک انجن اسپیڈ کنٹرول یا الیکٹرانک انجن اسپیڈ گورنمنٹ سرکٹ کے زیادہ قابل اعتماد نفاذ کے لئے ڈیزل انجن کی ایک جیسی رفتار میں کمی۔
سیٹ اپ کیسے کریں
ابتدائی طور پر ، IC1 کے IC # کے پن # 5 کے ساتھ ایمیٹر فالوور لنک کو ہٹا کر IC1 ، IC2 مراحل منقطع رکھیں۔
اگلا اس بات کو یقینی بنائیں کہ دونوں 100k مزاحم کاروں کو مناسب طریقے سے تبدیل کیا گیا ہے اور ایڈجسٹ کیا گیا ہے جیسے آئی سی 2 کا پن نمبر 3 انتہائی ممکنہ پی ڈبلیو ایم تیار کرتا ہے (@ وقت کی شرح پر تقریبا approximately 5٪)۔
اس کے بعد ، ایک کا استعمال کرتے ہوئے 0 سے 12V سایڈست بجلی کی فراہمی ، آئی سی 2 کے پن نمبر 5 پر مختلف وولٹیج لگائیں اور متناسب طور پر بڑھتے ہوئے پی ڈبلیو ایم کی تصدیق کریں # 3 پر۔
ایک بار حیرت انگیز حصے کا تجربہ کرنے کے بعد ، اس کے ٹیکومیٹر کو مطلوبہ حد سے زیادہ RPM کے مطابق ، ایک معروف RPM دالیں لگا کر جانچنا چاہئے۔ ایڈمیٹر پیروکار بی جے ٹی بیس پری سیٹ ایڈجسٹ کرنے کے دوران اس طرح سے کہ اس کا امیٹر کم سے کم 10V یا اتنی سطح پیدا کرنے کے قابل ہو جس سے آئی سی 2 پی ڈبلیو ایم منسلک پیڈل کنٹرول موٹر پر مطلوبہ ٹارک پیدا کرتا ہے۔
کچھ اور موافقت اور آزمائش کے بعد آپ انجن اور اس سے منسلک بوجھ کے ل the مطلوبہ خودکار اسپیڈ کنٹرول حاصل کرنے کی توقع کرسکتے ہیں۔
اپ ڈیٹ
اگر موٹر کو موسم بہار سے بھری ہوئی solenoid کے ساتھ تبدیل کردیا گیا ہے ، تو مندرجہ بالا ڈیزائن کو اتنا آسان بنایا جاسکتا ہے:

سولینائڈ شافٹ کا مقصد خودکار انجن اسپیڈ ریگولیشن کو پورا کرنے کے ل the ایکسلریٹر پیڈل کے ساتھ جوڑا جاسکتا ہے۔
تعدد سے وولٹیج کنورٹر کے متعلق مزید اختیارات کے ل you ، آپ اس کا حوالہ دے سکتے ہیں اس مضمون .
پچھلا: ٹائمر کنٹرولڈ فٹنس جم ایپلی کیشن سرکٹ اگلا: پیزو میٹ سرکٹ کے ساتھ بیٹری چارج کرنا