ایک سرکٹ جو متصل موٹر کو متبادل ان پٹ ٹرگرز کے ذریعہ گھڑی کی سمت اور اینٹلوک وائی سمتوں میں چلنے کی اجازت دیتا ہے اسے دو طرفہ کنٹرولر سرکٹ کہتے ہیں۔
ذیل میں پہلا ڈیزائن میں مکمل پل یا H پل پر مبنی دوئدرای موٹر موٹر کنٹرولر سرکٹ پر تبادلہ خیال کیا گیا ہے جو IC LM324 سے 4 opamps کا استعمال کرتے ہیں۔ دوسرے مضمون میں ہم آئی سی 556 کا استعمال کرتے ہوئے ہائی ٹورک بائیڈکشنل موٹر کنٹرولر سرکٹ کے بارے میں جانتے ہیں
تعارف
عام طور پر ، مکینیکل سوئچ کسی DC موٹر کی گردش کی سمت کو ایڈجسٹ کرنے کے عادی ہیں۔ استعمال شدہ وولٹیج اور موٹر کے قطبیت کو ایڈجسٹ کرنا مخالف سمت میں گھومتا ہے!
ایک طرف اس میں یہ خرابی ہوسکتی ہے کہ وولٹیج کی واضحیت کو تبدیل کرنے کے لئے ڈی پی ڈی ٹی سوئچ کو شامل کرنے کی ضرورت ہوتی ہے ، لیکن ہمارے پاس صرف سوئچ کے ساتھ معاہدہ ہوا ہے جس سے طریقہ کار کافی آسان ہوجاتا ہے۔
تاہم ، ڈی پی ڈی ٹی میں ایک سنگین مسئلہ ہوسکتا ہے ، اس کی سفارش نہیں کی جاتی ہے کہ آپ گھومنے والی حرکت کے دوران اچانک ڈی سی موٹر سے زیادہ وولٹیج کو الٹا دیں۔ اس کے نتیجے میں موجودہ سپائیک ہوسکتا ہے ، جو ممکنہ طور پر متعلقہ اسپیڈ کنٹرولر کو ختم کرسکتا ہے۔
مزید برآں ، کسی بھی طرح کا مکینیکل تناؤ بھی اسی طرح کے مسائل پیدا کرسکتا ہے۔ یہ سرکٹ ان پیچیدگیاں کو آسانی سے پیٹتا ہے۔ سمت اور رفتار کو تنہائی والے پوٹینومیٹر کی مدد سے جوڑا جاتا ہے۔ برتن کو کسی خاص سمت میں گھومنے سے موٹر گھومنے لگتا ہے۔
برتن کو مخالف سمت میں تبدیل کرنے سے موٹر ریورس موشن میں گھومنے کے قابل ہوجاتا ہے۔ برتن پر درمیانی پوزیشن موٹر کو بند کرتی ہے ، اس بات کو یقینی بناتی ہے کہ موٹر پہلے سست ہوجائے اور پھر سمت تبدیل کرنے کی کوشش کرنے سے پہلے رک جائے۔
تکنیکی خصوصیات
وولٹیج: سرکٹ اور موٹر عام بجلی کی فراہمی کا استعمال کرتے ہیں۔ اس کا مطلب یہ ہے کہ سب سے زیادہ کام کرنے والے وولٹیج کا LM324 32 وی ڈی سی ہے اسی طرح موٹر کو چلانے کے ل access قابل رسائی زیادہ سے زیادہ وولٹیج بن جاتا ہے۔
موجودہ: IRFZ44 MOSFET 49A کے لئے ڈیزائن کیا گیا ہے IRF4905 74A کو سنبھال سکے گا۔ بہرحال پی سی بی کی پٹریوں جو موسفٹ پن سے سکرو ٹرمینل بلاک تک چلتا ہے صرف 5A کا انتظام کرسکتا ہے۔ اس میں تانبے کے تار کے ٹکڑوں کو پی سی بی کی پٹریوں پر ڈال کر بہتر کیا جاسکتا ہے۔
اس معاملے میں یہ یقینی بنائیں کہ MOSFETs زیادہ گرم نہ ہوجائیں - اگر وہ ایسا کرتے ہیں تو ان آلات پر بڑے ہیٹ سکنکس لگانے کی ضرورت ہوگی۔
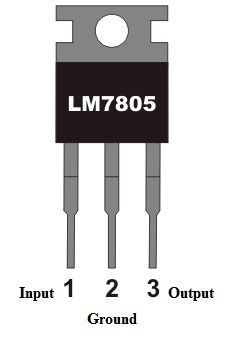
LM324 پن آؤٹ

LM324 استعمال کرتے ہوئے DC موٹروں کا دو طرفہ کنٹرول
بنیادی طور پر ، آپ کو 3 طریقے ملیں گے DC موٹروں کی رفتار کو ایڈجسٹ کریں :
1۔ مثالی سرعت حاصل کرنے کے لئے میکانائزڈ گیئرز کا استعمال کرکے: گھریلو ورکشاپس میں مشق کرنے والے بیشتر حوصلوں کی سہولت سے یہ نقطہ نظر اکثر اور زیادہ ہوتا ہے۔
دو سیریز کے ریسسٹار کے ذریعہ موٹر وولٹیج کو کم کرنا۔ یہ یقینی طور پر غیر موثر ہوسکتا ہے (ریزٹر میں طاقت ختم ہوجائے گی) اور اس کے نتیجے میں ٹارک کی کمی واقع ہوگی۔
موٹر کا بوجھ بڑھنے کے ساتھ ہی موٹر کے استعمال میں آنے والا موجودہ بھی اونچا ہوتا ہے۔ کرنٹ میں اضافے کا مطلب ہے سیریز کے ریزسٹر پر زیادہ وولٹیج ڈراپ اور اسی وجہ سے موٹر کے لئے گرا ہوا ولٹیج۔
اس کے بعد موٹر ایک حالیہ کرنٹ کو بھی زیادہ مقدار میں کھینچنے کی کوشش کرتا ہے ، جس سے موٹر اسٹال ہوجاتا ہے۔
3۔ مختصر دالوں میں موٹر پر سپلائی کی پوری وولٹیج کا استعمال کرکے: اس طریقہ سے سیریز گرنے کے اثر سے نجات مل جاتی ہے۔ اس کو پلس چوڑائی ماڈلن (پی ڈبلیو ایم) کہا جاتا ہے اور اس سرکٹ میں پائی جانے والی حکمت عملی ہے۔ فوری دالیں موٹر کو آہستہ آہستہ بڑھی ہوئی دالوں کو چلانے کی اجازت دیتی ہیں جس سے موٹر زیادہ تیز چلتا ہے۔

یہ کیسے کام کرتے ہیں (منصوبہ بندی سے رجوع کریں)
سرکٹ کو چار مراحل میں تقسیم کیا جاسکتا ہے۔
1. موٹر کنٹرول - آئی سی 1: اے
2. مثلث کی لہر پیدا کرنے والا - IC1: B
3. وولٹیج موازنہ کرنے والا - آئی سی 1: سی اور ڈی
4. موٹر ڈرائیو - Q3-6
آئیے ہم موٹر ڈرائیور مرحلے کے ساتھ شروع کریں ، جس میں MOSFETs Q3-6 کے ارد گرد مرکز ہے۔ ان MOSFETs میں سے صرف کچھ وقت کسی بھی وقت متحرک حالت میں رہتے ہیں۔ جبکہ کیو 3 اور کیو 6 موٹر کے ذریعے رواں دواں ہیں اور اس کی وجہ ایک ہی سمت میں گھومتے ہیں۔
جیسے ہی Q4 اور Q5 آپریٹنگ حالت میں ہوں موجودہ گردش الٹ ہوئ ہے اور موٹر مخالف سمت میں گھومنے لگتا ہے۔ IC1: C اور IC1: D ڈیل جس کے ساتھ MOSFETs کو آن کیا جاتا ہے۔
اوپیامپ آئی سی 1: سی اور آئی سی 1: ڈی ولٹیج کمپارٹر کے طور پر وائرڈ ہیں۔ ان opamps کے لئے حوالہ وولٹیج R6 ، R7 اور R8 کے مزاحم وولٹیج تقسیم سے تیار کیا جاتا ہے۔
مشاہدہ کریں کہ آئی سی 1: ڈی کے لئے حوالہ وولٹیج '+' ان پٹ کے ساتھ منسلک ہے لیکن آئی سی 1: سی کے لئے یہ '-' ان پٹ کے ساتھ مل کر ہے۔
اس کا مطلب ہے آئی سی 1: ڈی اس کے حوالہ سے زیادہ وولٹیج کے ساتھ چالو ہے جبکہ آئی سی 1: سی کو اس کے حوالہ سے کم وولٹیج کے ساتھ اشارہ کیا جاتا ہے۔ اوپیمپ آئی سی 1: بی کو ایک مثلث لہر جنریٹر کے طور پر تشکیل دیا گیا ہے اور متعلقہ وولٹیج موازنہ کرنے والوں کو ایکٹیویشن سگنل فراہم کرتا ہے۔
تعدد R5 اور C1 - 270Hz میں ملازمت کی اقدار کے ل time وقت مستقل طور پر الٹا ہے۔
R5 یا C1 کو کم کرنے سے ان دونوں میں سے کسی ایک میں بھی بڑھتی ہوئی تعدد میں اضافہ ہوتا ہے۔ تعدد کو کم کرنے جا رہا ہے۔ مثلث کی لہر کی چوٹی سے چوٹی پیداوار کی سطح دو وولٹیج حوالوں کے مابین فرق سے بہت کم ہے۔
لہذا دونوں تقابلی کاروں کے لئے بیک وقت چالو ہونا انتہائی مشکل ہے۔ بصورت دیگر تمام 4 MOSFETs کا انعقاد شروع ہوگا ، جس سے ایک شارٹ سرکٹ ہوگا اور ان سب کو برباد کر دے گا۔
مثلث کی لہراتی شکل ڈی سی آفسیٹ وولٹیج کے ارد گرد تشکیل دی جاتی ہے۔ آفسیٹ وولٹیج کو بڑھانا یا کم کرنا مثلث لہر کی نبض کی پوزیشن مناسب طور پر مختلف ہوتی ہے۔
مثلث کی لہر کو اوپر کی طرف سوئچ کرنے سے موازنہ کار IC1: D کو چالو کرنے کے قابل بناتا ہے۔ جب مثلثی لہر کی وولٹیج کی سطح دو وولٹیج حوالوں کے وسط میں ہوتی ہے تو پھر کوئی بھی موازنہ کرنے والے کو آمادہ نہیں کیا جاتا ہے۔ DC آفسیٹ وولٹیج کو پوٹینومیٹر P1 کے ذریعہ IC1: A کے ذریعہ ریگولیٹ کیا جاتا ہے ، جو ایک وولٹیج پیروکار کے طور پر ڈیزائن کیا گیا ہے۔
اس سے کم آؤٹ پٹ مائبادا voltage وولٹیج کا ماخذ ملتا ہے ، جس سے ڈی سی آفسیٹ وولٹیج کو آئی سی 1: بی کے بوجھ کے اثر سے کم خطرہ ہوتا ہے۔
جیسے ہی 'برتن' تبدیل کیا جاتا ہے DC آفسیٹ وولٹیج مختلف ہوتا ہے ، یا تو اوپر کی طرف یا برتن پھٹ گیا اس سمت کی بنیاد پر۔ ڈایڈڈ D3 کنٹرولر کے ل re ریورس پولٹریٹی سیف گارڈ پیش کرتا ہے۔
ریزسٹر آر 15 اور کپیسیٹر سی 2 ایک سادہ لو پاس فلٹر ہیں۔ اس کا مطلب یہ ہے کہ MOSFETs کے ذریعہ لائی جانے والی کسی بھی وولٹیج کی بڑھتی ہوئی واردات کو صاف کرنا ہے کیونکہ وہ موٹر کو بجلی کی فراہمی کو چالو کرتے ہیں۔
حصوں کی فہرست

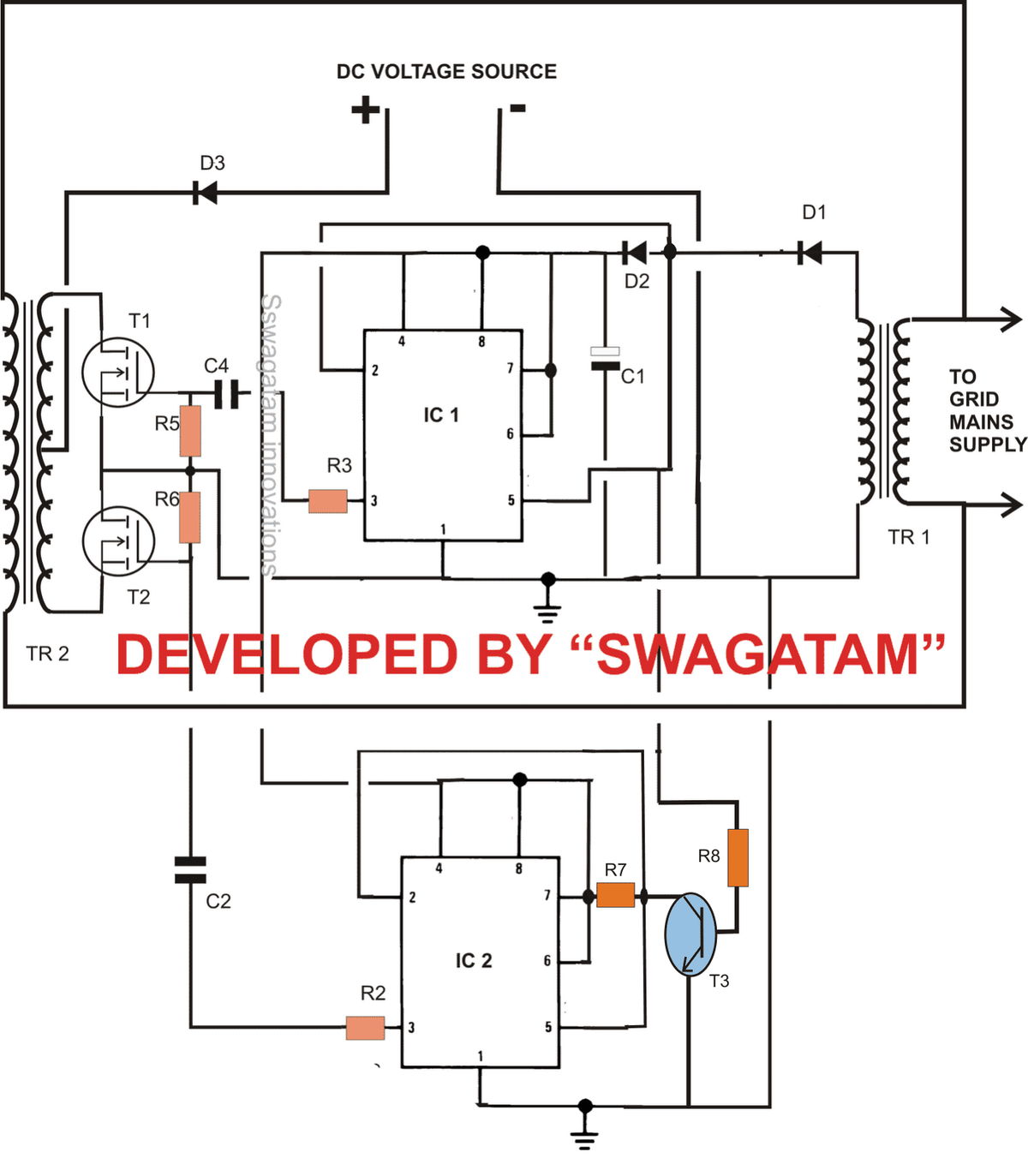
2) آئی سی 556 کا استعمال کرتے ہوئے دو طرفہ موٹر کنٹرول
ڈی سی موٹرز کے لئے رفتار اور دو طرفہ کنٹرول کو نافذ کرنے کے لئے نسبتا آسان ہے۔ آزادانہ طور پر متحرک موٹروں کے ل the ، رفتار ، اصولی طور پر ، سپلائی وولٹیج کا ایک لکیری فنکشن مستقل مقناطیس والی موٹرس آزادانہ طور پر متحرک موٹرز کا ایک ذیلی زمرہ ہے ، اور وہ اکثر کھلونے اور ماڈلز میں استعمال ہوتے ہیں۔
اس سرکٹ میں ، موٹر سپلائی وولٹیج نبض کی چوڑائی ماڈیولیشن (پی ڈبلیو ایم) کے ذریعہ مختلف ہوتی ہے جو اچھی کارکردگی کے ساتھ ساتھ کم موٹر سپیڈ پر نسبتا high زیادہ ٹارک بھی یقینی بناتی ہے۔ 0 اور +10 V کے درمیان ایک ہی کنٹرول وولٹیج موٹر کی رفتار کو الٹ اور دونوں سمتوں میں زیادہ سے زیادہ حد تک تبدیل کرنے کے قابل بناتا ہے۔
حیرت انگیز ملٹی وریٹر آئی سی ایک 80 ہرٹج آسکیلیٹر کے طور پر مرتب کیا گیا ہے ، اور پی ڈبلیو ایم سگنل کی تعدد کا تعین کرتا ہے۔ موجودہ ماخذ T1 Ca پر چارج کرتا ہے۔ اس کاپاکیٹر کے اس پار کا اونٹو وولٹیج کا مقابلہ 1C2 میں کنٹرول وولٹیج کے ساتھ کیا جاتا ہے ، جو PWM سگنل کو N1-N یا NPN1 کے بفر سے باہر لے جاتا ہے۔ ڈارلنگٹن میں مقیم موٹر ڈرائیور ایک برج سرکٹ ہے جو 4 ایمپز تک کا بوجھ ڈرائیو کرنے کی صلاحیت رکھتا ہے ، فراہم کردہ موجودہ اسٹمپ 5 ایم پی ایس سے کم رہتا ہے ، اور پاور ٹرانجسٹرز ٹی 1 ٹی ٹی کے لئے کافی ٹھنڈک فراہم کی جاتی ہے۔ ڈائیڈس D1 ، D5 موٹر سوئچ S1 کی طرف سے آگمناتمک اضافے کے خلاف حفاظت کے متحمل ہے تاکہ فوری طور پر موٹر سمت کو تبدیل کرنا ممکن ہوجاتا ہے۔

پروٹو ٹائپ امیجز



پچھلا: یمپلیفائر سرکٹس کو سمجھنا اگلا: ٹرانجسٹرس (بی جے ٹی) اور موسوفٹ کو ارڈوینو کے ساتھ کیسے جوڑیں