TO موٹر ایک برقی آلہ ہے جو برقی ان پٹ کو مکینیکل آؤٹ پٹ میں تبدیل کرتا ہے ، جہاں برقی ان پٹ موجودہ یا وولٹیج کی شکل میں ہوسکتی ہے اور مکینیکل آؤٹ پٹ ٹارک یا طاقت کی شکل میں ہوسکتی ہے۔ انجن اسٹیٹر اور روٹر کے دو اہم حص .وں پر مشتمل ہوتا ہے ، جہاں اسٹیٹر موٹر کا ایک مستحکم حصہ ہوتا ہے اور روٹر موٹر کا گھومنے والا حصہ ہوتا ہے۔ ایک موٹر جو سرکشی کے اصول پر کام کرتی ہے اسے ریپلشن موٹر کہا جاتا ہے ، جہاں پسپائی اسٹیٹر یا روٹر کے دو مقناطیسی شعبوں کے مابین ہوتی ہے۔ سرقہ موٹر ہے a واحد مرحلہ انجن
بغاوت موٹر کیا ہے؟
تعریف: پسپا موٹر ایک واحد فیز الیکٹرک موٹر ہے جو ان پٹ AC (متبادل کرنٹ) فراہم کرکے چلتی ہے۔ بغاوت موٹر کی بنیادی درخواست بجلی سے چلنے والی ٹرینیں ہیں۔ یہ ایک سرقہ والی موٹر کے طور پر شروع ہوتا ہے اور انڈکشن موٹر کے طور پر چلتا ہے ، جہاں شروعاتی ٹارک ریپلشن موٹر کے ل high زیادہ ہونا چاہئے اور انڈکشن موٹر کے لئے چلنے والی بہت اچھی خصوصیات ہیں۔
بغاوت موٹر کی تعمیر
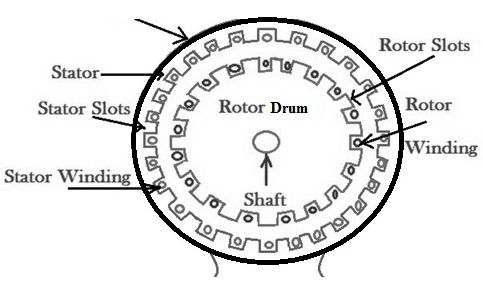
یہ ایک سنگل فیز اے سی موٹر ہے ، جس میں قطب خانہ ہوتا ہے جو مقناطیس کا شمالی قطب اور جنوبی قطب ہوتا ہے۔ اس موٹر کی تعمیر اسپلٹ فیز انڈکشن موٹر اور جیسی ہے ڈی سی سیریز موٹر۔ روٹر اور اسٹیٹر موٹرز کے دو اہم اجزاء ہیں جو موثر انداز میں جوڑا جاتا ہے۔ فیلڈ سمیٹ (یا تقسیم شدہ سمیٹ والی سمت یا اسٹیٹر) اسپلٹ فیز انڈکشن موٹر کی مرکزی سمیٹ کی طرح ہے۔ لہذا بہاؤ یکساں طور پر تقسیم کیا جاتا ہے اور اسٹیٹر اور روٹر کے مابین فرق کم ہوجاتا ہے اور ہچکچاہٹ بھی کم ہوتی ہے ، جس کے نتیجے میں بجلی کے عنصر میں بہتری آتی ہے۔
روٹر یا آریمیچر ڈی سی سیریز موٹر کی طرح ہے جو کمٹومیٹر سے منسلک ڈھول کی قسم کی سمیٹنگ کے ساتھ فراہم کی جاتی ہے جہاں کموٹیٹر کاربن برش سے منسلک ہوتا ہے جو مختصر گردش میں ہوتا ہے۔ ایک برش ہولڈر میکانزم محور کے ساتھ ساتھ برشوں کی سمت یا سیدھ میں تبدیلی کے ل vari متغیر کرینکشاٹ فراہم کرتا ہے۔ لہذا اس عمل کے دوران پیدا ہونے والا ٹارک رفتار کو کنٹرول کرنے میں مدد کرتا ہے۔ بغاوت موٹر میں توانائی کے ذریعے منتقل کیا جاتا ہے ٹرانسفارمر عمل یا شامل عمل کے ذریعہ (جہاں ایم ایف اسٹیٹر کے درمیان روٹر میں منتقل ہوتا ہے)۔

بغاوت-موٹر کاپی کی تعمیر
ورکنگ اصول
بغاوت موٹر پسپا کے اصول پر کام کرتی ہے جہاں ایک مقناطیس کے دو ڈنڈے پیچھے ہٹ جاتے ہیں۔ ریپلشن موٹر کے کام کرنے والے اصول کی وضاحت can کے 3 معاملات سے کی جاسکتی ہے ، مقناطیس کی پوزیشن پر انحصار کرتے ہوئے۔
کیس (i) : جب α = 900
فرض کریں کہ برش ‘C اور D’ عمودی طور پر 90 ڈگری پر منسلک ہیں اور روٹر افقی طور پر ڈی محور (فیلڈ محور) کے ساتھ منسلک ہے جو موجودہ بہاؤ کی سمت ہے۔ کے اصول سے لینز کا قانون ، ہم جانتے ہیں کہ ایمیف حوصلہ افزائی بنیادی طور پر اسٹیٹر بہاؤ اور موجودہ سمت (جو برش کی سیدھ پر مبنی ہے) پر منحصر ہے۔ لہذا ، 'C to D' تک برش کا خالص emf '0' ہے جیسا کہ آریھ میں دکھایا گیا ہے ، جسے 'x' اور 'دکھایا جاتا ہے۔' روٹر میں موجودہ بہاؤ نہیں ہے ، لہذا جب = = نہیں جب روٹر میں موجودہ گزرتا ہے ، پھر یہ ایک کھلی سرکولیٹ ٹرانسفارمر کے طور پر کام کرتا ہے۔ لہذا ، اسٹیٹر موجودہ ہے = کم. مقناطیسی فیلڈ کی سمت برش محور کی سمت کے ساتھ ہے ، جہاں اسٹیٹر اور روٹر فیلڈ محور 180 ڈگری مرحلے پر منتقل ہوچکے ہیں ، پیدا کردہ ٹارک ‘0’ ہے اور موٹر میں شامل باہمی شمولیت ‘0’ ہے۔

90 ڈگری پوزیشن
مکانات (ii) : جب α = 00
اب برش ‘C اور D’ ڈی محور کے ساتھ ہی مبنی ہیں اور مختصر گردش میں ہیں۔ لہذا موٹر میں شامل نیٹ ایم ایف بہت زیادہ ہے ، جو سمیٹ کے مابین بہاؤ پیدا کرتا ہے۔ جیسا کہ اعداد و شمار میں دکھایا گیا ہے ، نیٹ ایم ایف کی نمائندگی 'x' اور '' کے طور پر کی جاسکتی ہے۔ یہ ایک مختصر گردش ٹرانسفارمر کی طرح ہے. جہاں اسٹیٹر کرنٹ اور باہمی شامل ہونے کا میکسما ہوتا ہے جس کا مطلب ہے کہ = = ہے = زیادہ سے زیادہ۔ اعداد و شمار سے ، ہم مشاہدہ کر سکتے ہیں کہ اسٹیٹر اور روٹر فیلڈز مرحلے میں 180 ڈگری کے برعکس ہیں ، جس کا مطلب ہے کہ پیدا کردہ ٹارک ایک دوسرے کی مخالفت کرے گا ، لہذا روٹر گھوم نہیں سکتا۔

α = 0 زاویہ
کیس (iii): جب α = 450
جب برش ‘C اور D’ کسی زاویہ (45 ڈگری) پر مائل ہوجاتی ہے اور برش مختصر ہوجاتے ہیں۔ آئیے فرض کریں کہ روٹر (برش محور) فکس ہوچکا ہے اور اسٹیٹر کو گھمایا گیا ہے۔ اسٹیٹر سمیingت کی نمائندگی موثر موڑ کی ’’ Ns ‘‘ کی حیثیت سے کی جاتی ہے اور موجودہ گزرنا ‘ہے’ ، اسٹیٹر کے ذریعہ تیار کردہ فیلڈ اس سمت میں ہے ‘Is Ns’ جو اسٹیٹر MMF ہے جیسا کہ اعداد و شمار میں دکھایا گیا ہے۔ ایم ایم ایف (میگنیٹوموٹو فورس) کو دو اجزاء (ایم ایم ایف 1 اور ایم ایم ایف 2) میں حل کیا گیا ہے ، جہاں ایم ایم ایف 1 برش سمت (آئس این ایف) کے ساتھ ہے اور ایم ایم ایف 2 برش سمت (اس این ٹی) کے ساتھ کھڑا ہے جو ٹرانسفارمر سمت ہے ، اور 'α 'is Nt' اور 'Is Nf' کے درمیان زاویہ ہے۔ لہذا اس فیلڈ کے ذریعہ دو اجزاء میں تیار کردہ بہاؤ ‘is Nf’ اور ‘Is Nt’ ہے۔ روٹر میں شامل ایم ایف کیو محور کے ساتھ بہاؤ پیدا کرتا ہے۔

مائل زاویہ کی پوزیشن
مندرجہ ذیل کے مطابق ، برش کے محور کے ساتھ روٹر کے ذریعہ تیار کردہ فیلڈ ریاضی کی نمائندگی کرتا ہے
کیا این ٹی = کیا این ایس کوس ہے α ……… .. 1
Nt = Ns Cos α ………… 2
Nf = Ns گناہ α ………… 3
چونکہ مقناطیسی محور ‘T’ اور برش کا محور روٹر ایم ایم ایف کے ساتھ موافق ہے جو برش کے محور کے ساتھ ہے اسٹیٹر کے ذریعہ پیدا ہونے والے بہاؤ کے برابر ہے۔

torque اخذ
torque کی مساوات کے طور پر دیا گیا ہے
Ґ α (اسٹیٹر ڈی محور ایم ایم ایف) * (روٹر کیو-محور ایم ایم ایف) ……… .4
Ґ α (کیا این ایس گنا ہے α) (کیا این ایس کوس ہے α) ……… ..5
Ґ α I 2s N 2s گناہ α [know ہم جانتے ہیں کہ گناہ 2 α = 2 گناہ α کاس α] ……… .6
Ґ α ½ (I 2s N 2s Sin2 α) …… .7
Ґ α K I 2s N 2s Sin2 α [جب α = 0 ٹارک = 0 ………. .8
K = مستقل قیمت α = π / 4 ٹورک = زیادہ سے زیادہ
گرافیکل نمائندگی
عملی طور پر یہ ایک مسئلہ ہے جسے گرافیکل شکل میں دکھایا جاسکتا ہے ، جہاں ایکس محور کو ’’ α ‘‘ کی نمائندگی کی جاتی ہے اور وائی محور کو ’موجودہ‘ کے طور پر پیش کیا جاتا ہے۔

گرافیکل نمائندگی
- گراف سے ، ہم مشاہدہ کر سکتے ہیں کہ موجودہ براہ راست α کے متناسب ہے
- موجودہ قیمت 0 ہے جب α = 900 جو اوپن سرکٹ ٹرانسفارمر کی طرح ہے
- موجودہ وقت زیادہ سے زیادہ ہے جب α = 00 گراف میں دکھائے جانے والے شارٹ سرکٹ ٹرانسفارمر کی طرح ہے۔
- اسٹیٹر موجودہ کہاں ہے؟
- ٹارک مساوات Ґ α K I 2s N 2s Sin2 as کے طور پر دی جاسکتی ہے۔
- عملی طور پر دیکھا گیا ہے کہ اگر α 150 - 300 کے درمیان ہے تو ٹارک زیادہ سے زیادہ ہے۔
بغاوت موٹر کی درجہ بندی
تین قسم کی ریپلشن موٹر وہ ہیں ،
معاوضہ کی قسم
یہ ایک اضافی سمیٹ پر مشتمل ہوتا ہے یعنی سمیatingی سمی .ت کو معاوضہ دیتا ہے اور برشوں کی ایک اضافی جوڑی (شارٹ سرکیٹڈ) برشوں کے درمیان رکھی جاتی ہے۔ معاوضہ سمیٹنے اور برش کا ایک جوڑا دونوں بجلی اور رفتار کے عوامل کو بہتر بنانے کے سلسلے میں ایک دوسرے سے جڑے ہوئے ہیں۔ ایک معاوضہ والی موٹر استعمال کی جاتی ہے جہاں ایک ہی رفتار سے تیز طاقت کی ضرورت ہوتی ہے۔

معاوضہ کی قسم کی بھگدڑ موٹر
بغاوت اسٹارٹ انڈیکشن ٹائپ
اس کی شروعات کوئلوں سے سرکشی کے ساتھ ہوتی ہے اور انڈکشن اصول کے ساتھ چلتی ہے ، جہاں رفتار کو مستقل برقرار رکھا جاتا ہے۔ اس میں ڈی سی آرمچر اور کمیوٹر کی طرح ایک ہی اسٹیٹر اور روٹر ہے جہاں ایک سنٹرفیوج میکانزم کموٹیٹر باروں کو شارٹ سرکٹ کرتا ہے اور بوجھ میں موجودہ سے زیادہ ٹارک (6 گنا) ہوتا ہے۔ پسپائی کا عمل اس گراف سے سمجھا جاسکتا ہے کہ ، جب مطابقت پذیر رفتار کی فریکوئینسی بڑھتی ہے تو ، مکمل ٹارک بوجھ کا تناسب کم ہونا شروع ہوتا ہے ، جہاں ایک موقع پر مقناطیس کے کھمبے میں ایک اپکار قوت کا سامنا ہوتا ہے اور انڈکشن موڈ میں سوئچ ہوجاتا ہے۔ یہاں ہم اس بوجھ کا مشاہدہ کرسکتے ہیں جو رفتار کے متضاد تناسب ہے۔

بغاوت-شروع-انڈکشن-موٹر گراف
یہ پسپائی اور شامل کرنے کے اصول پر کام کرتا ہے ، جو ایک اسٹیٹر سمیٹ ، 2 گھومنے والی سمیٹ (جہاں ایک گلہری پنجرا اور دوسرا ڈی سی سمیٹ ہوتا ہے) پر مشتمل ہوتا ہے۔ یہ سمت کموئٹر اور دو برش پر موڑ دی جاتی ہے۔ یہ ایسی حالت میں چلتا ہے جہاں بوجھ ایڈجسٹ ہوسکے اور جس کا آغاز ٹارک 2.5-3 ہو۔

بغاوت کی قسم
فوائد
فوائد ہیں
- ٹارک شروع کرنے کی اعلی قیمت
- رفتار محدود نہیں ہے
- ‘α’ کی قدر کو ایڈجسٹ کرکے ہم ٹارک کو ایڈجسٹ کرسکتے ہیں ، جہاں ہم ٹورک کو ایڈجسٹ کرنے کی بنیاد پر رفتار بڑھا سکتے ہیں۔
- پوزیشن برش کو ایڈجسٹ کرکے ، ہم آسانی سے ٹارک اور رفتار کو کنٹرول کرسکتے ہیں۔
نقصانات
نقصانات ہیں
- بوجھ میں تبدیلی کے ساتھ رفتار مختلف ہوتی ہے
- تیز رفتار کے علاوہ طاقت کا عنصر کم ہے
- لاگت زیادہ ہے
- اعلی دیکھ بھال.
درخواستیں
درخواستیں ہیں
- وہیں استعمال کیا جاتا ہے جہاں تیز رفتار سامان کے ساتھ ٹارک شروع کرنے کی ضرورت ہو
- کوئل ونڈرز: جہاں ہم رفتار کو لچکدار اور آسانی سے ایڈجسٹ کرسکتے ہیں اور برش کے محور کی سمت کو تبدیل کرکے بھی سمت تبدیل کی جاسکتی ہے۔
- کھلونے
- لفٹیں وغیرہ۔
عمومی سوالنامہ
1) بغاوت موٹر کا تجربہ پسپا کون سا زاویہ ہے؟
45 ڈگری زاویہ پر ، اس میں پسپائی کا سامنا ہوتا ہے۔
2). بغاوت موٹر کس اصول پر مبنی ہے؟
یہ سرکشی کے اصول پر مبنی ہے
3)۔ ریپلشن موٹر کے دو اہم اجزاء کیا ہیں؟
اسٹیٹر اور روٹر موٹر کے دو اہم اجزاء ہیں۔
4)۔ پسپاتی موٹر میں ٹارک کو کیسے قابو کیا جاسکتا ہے؟
موٹر کے بنیادی برش کو ایڈجسٹ کرکے ٹارک کو قابو کیا جاسکتا ہے
5)۔ بغاوت موٹر کی درجہ بندی
وہ 3 اقسام میں درجہ بند ہیں
- بغاوت کی قسم
- مزاحمت اسٹارٹ انڈکشن رن موٹر
- معاوضہ کی قسم
اس طرح ، یہ ایک ہے بغاوت موٹر کا جائزہ جو سرکشی کے اصول پر کام کرتا ہے۔ اس میں دو اہم اجزاء ہیں یعنی اسٹیٹر اور روٹر۔ موٹر کے کام کرنے والے اصول کو زاویوں (0 ، 90،45 ڈگری) کی تین صورتوں میں سمجھا جاسکتا ہے جو برش پوزیشن اور پیدا شدہ کھیتوں پر مبنی ہیں۔ موٹر صرف 45 ڈگری پر ہی مکروہ اثر کا تجربہ کرتا ہے۔ یہ موٹریں استعمال ہوتی ہیں جہاں ٹارک شروع کرنا انتہائی ضروری ہوتا ہے۔ بنیادی فائدہ یہ ہے کہ برش کو ایڈجسٹ کرکے ٹارک کو قابو کیا جاسکتا ہے۔