بجلی کے نظام میں ، ہم صنعتوں میں یا تو استعمال کرتے ہیں ، بجلی گھر یا گھریلو ضروریات ، موٹریں اور جنریٹر ایک عام چیز بن چکے ہیں۔ اعلی توانائی کے موثر اور کم بجلی استعمال کرنے والے نظام کی مانگ کے ساتھ ، ان برقی آلات کے نئے ماڈل کی ایجاد دیکھنے میں آتی ہے۔ موٹروں اور جنریٹرز کے قابل اعتماد آپریشن کے لئے بنیادی حساب کتاب عنصر ہے پاور فیکٹر . یہ مطلوبہ طاقت سے زیادہ استعمال شدہ طاقت کا تناسب ہے۔ عام طور پر ، صنعتوں اور فیکٹریوں میں استعمال ہونے والی کل طاقت سے بجلی کے عنصر کی بنیاد پر حساب کیا جاتا ہے۔ لہذا ، طاقت کا عنصر ہمیشہ اتحاد پر قائم رہنا چاہئے۔ لیکن ان آلات میں رد عمل کی طاقت کے عروج کی وجہ سے پاور فیکٹر کم ہوتا ہے۔ اتحاد میں طاقت کے عنصر کو برقرار رکھنے کے ل many بہت سے طریقے متعارف کروائے گئے ہیں۔ ہم وقت ساز موٹر تصور ان میں سے ایک ہے۔
ہم وقت ساز موٹر کیا ہے؟
مطابقت پذیر موٹر کی تعریف میں کہا گیا ہے کہ ”ایک AC موٹر جس میں مستحکم حالت میں ، شافٹ کی گردش کا اطلاق موجودہ کرنٹ کی تعدد کے ساتھ مطابقت پذیر ہوتا ہے۔ مطابقت پذیر موٹر AC موٹر کے طور پر کام کرتی ہے لیکن یہاں شافٹ کے ذریعہ باری باری ہوئی گردشوں کی کل تعداد اطلاق شدہ موجودہ کی فریکوئینسی کے عددی ایک سے زیادہ کے برابر ہے۔

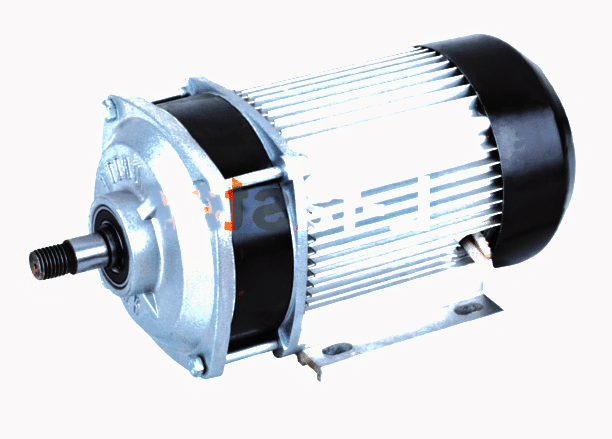
ہم وقت ساز موٹر
ہم وقت ساز موٹر کام کرنے کیلئے انڈکشن کرنٹ پر انحصار نہیں کرتی ہے۔ ان موٹروں میں ، انڈکشن موٹر کے برعکس ، ملٹی فیز اے سی برقی مقناطیس موجود ہیں ریاست r ، جو گھومنے والا مقناطیسی میدان پیدا کرتا ہے۔ یہاں روٹر ایک مستقل مقناطیس کا ہے جو گھومنے والے مقناطیسی فیلڈ کے ساتھ ہم آہنگ ہوتا ہے اور اس پر لگائے جانے والے حالیہ تعدد کی مطابقت پذیری میں گھومتا ہے۔
ہم وقت ساز موٹر ڈیزائن
اسٹیٹر اور روٹر ہیں اہم اجزاء ہم وقت ساز موٹر کی۔ یہاں اسٹیٹر فریم میں ریپر پلیٹ موجود ہے جس میں کی بورڈز اور فریم ورک پسلیاں منسلک ہیں۔ مشین کو سہارا دینے کے لئے فٹنگ ، فریم ماونٹس کا استعمال کیا جاتا ہے۔ ڈی سی کے ساتھ فیلڈ ونڈنگ کو پرجوش کرنے کے لئے ، پرچی بجتی ہے اور برش کا استعمال کیا جاتا ہے۔
بیلناطیسی اور گول گھومنے والے 6 قطب اطلاق کے لئے استعمال ہوتے ہیں۔ جب قطب کی بڑی مقدار کی ضرورت ہو تو نمایاں قطب گردش کا استعمال کیا جاتا ہے۔ ہم وقت ساز موٹر اور ہم وقت ساز الٹرنیٹر کی تعمیر اسی طرح کی ہے۔
ہم وقت ساز موٹر ورکنگ اصول
ہم وقت ساز موٹروں کا کام اسٹیٹر کے مقناطیسی میدان کے روٹر کے مقناطیسی فیلڈ کے تعامل پر منحصر ہوتا ہے۔ اسٹیٹر میں 3 مرحلے سے چلنے والے سمندری راستے شامل ہوتے ہیں اور 3 فیز پاور کے ساتھ فراہم کی جاتی ہے۔ اس طرح ، اسٹیٹر سمیٹ 3 مرحلہ وار گھومنے والا مقناطیسی فیلڈ تیار کرتا ہے۔ ڈی سی سپلائی روٹر کو دی جاتی ہے۔
روٹر گھومنے والی مقناطیسی فیلڈ میں داخل ہوتا ہے جو اسٹیٹر سمیٹ کے ذریعہ تیار کیا جاتا ہے اور ہم آہنگی میں گھومتا ہے۔ اب ، موٹر کی رفتار فراہم کردہ موجودہ کی تعدد پر منحصر ہے۔
مطابقت پذیر موٹر کی رفتار کو لاگو موجودہ کی تعدد کے ذریعہ کنٹرول کیا جاتا ہے۔ مطابقت پذیر موٹر کی رفتار کا حساب کتاب کیا جاسکتا ہے
Ns = 60f / P = 120f / p
جہاں ، ایف = AC کی فریکوئنسی (ہرٹج)
p = فی مرحلے میں قطبوں کی کل تعداد
P = فی جوڑ میں ڈنڈوں کی کل جوڑی تعداد۔
اگر خرابی کے بوجھ سے زیادہ بوجھ کا اطلاق ہوتا ہے تو ، موٹر نزاکت ہوجاتی ہے۔ 3 مرحلے اسٹیٹر سمیڑ گردش کی سمت کا تعین کرنے کا فائدہ دیتا ہے۔ سنگل فیز سمیٹنے کی صورت میں ، گردش کی سمت حاصل کرنا ممکن نہیں ہے اور موٹر کسی بھی سمت میں شروع ہوسکتا ہے۔ ان مطابقت پذیر موٹروں میں گردش کی سمت کو کنٹرول کرنے کے لئے ، شروعاتی انتظامات کی ضرورت ہے۔
ہم وقت ساز موٹر کے آغاز کے طریقے
روٹر کی جڑتا کا لمحہ بڑے سائز کے ہم وقت ساز موٹروں کو خود شروع ہونے سے روک دیتا ہے۔ روٹر کی اس جڑت کی وجہ سے ، یہ ممکن نہیں ہے کہ ایک روٹر اسٹیٹر کے مقناطیسی فیلڈ کے ساتھ مطابقت پذیر ہوجائے ، بالکل اسی وقت طاقت کا اطلاق ہوتا ہے۔ لہذا روٹر کو مطابقت پذیر بنانے میں مدد کے لئے کچھ اضافی میکانزم کی ضرورت ہے۔
انڈکشن سمیٹنا بڑی موٹروں میں شامل ہے جو ایکسلریشن کے ل required مطلوبہ ٹورک تیار کرتا ہے۔ بہت بڑی موٹروں کے ل the ، غیر لوڈ شدہ مشین کو تیز کرنے کے لئے ، ٹٹو موٹر استعمال کی جاتی ہے۔ اسٹیٹر کی موجودہ تعدد کو تبدیل کرنا ، الیکٹرانک طور پر چلنے والی موٹریں صفر کی رفتار سے بھی تیز ہوسکتی ہیں۔
بہت چھوٹی موٹروں کے ل when ، جب روٹر اور میکانی بوجھ کی جڑتا کا لمحہ مطلوبہ طور پر چھوٹا ہوتا ہے ، تو وہ شروعاتی طریقوں کے بغیر شروع کرسکتے ہیں۔
ہم وقت ساز موٹر کی اقسام
روٹر کی میگنیٹائزیشن کے طریقہ کار پر منحصر ہے ، دو قسم کے ہم آہنگی والی موٹریں ہیں۔
- غیر پرجوش
- براہ راست موجودہ پرجوش.
غیر حوصلہ افزائی موٹر
ان موٹروں میں ، بیرونی اسٹیٹر فیلڈ کے ذریعہ روٹر میگنیٹائز کیا جاتا ہے۔ روٹر میں مستقل مقناطیسی میدان ہوتا ہے۔ اعلی برقرار رکھنے والے اسٹیل جیسے کوبالٹ اسٹیل کو روٹر بنانے کے لئے استعمال کیا جاتا ہے۔ یہ مستقل مقناطیس ، تذبذب اور ہسٹریسس موٹرز کے درجہ بند ہیں۔
- مستقل مقناطیس کی ہم آہنگی والی موٹرز میں ، مستقل مقناطیس اسٹیل کے ساتھ ساتھ روٹر ڈیزائن کے لئے استعمال ہوتا ہے۔ روٹر میں ان کا مستقل مقناطیسی فیلڈ ہوتا ہے ، لہذا شروع کرنے کے لئے انڈکشن ونڈ کا استعمال نہیں کیا جاسکتا۔ گیئر لیس لفٹ موٹروں کی حیثیت سے استعمال کیا جارہا ہے۔

- تذبذب کی موٹر میں ، روٹر اسٹیل کاسٹنگ سے بنا ہوا ہے جس میں ٹوٹوڈ ڈنڈے پیش کیے جاتے ہیں۔ ٹارک لہروں کو کم سے کم کرنے کے ل r ، اسٹیٹر کے کھمبوں سے روٹر کے کھمبے کم ہیں۔ روٹر کو شروعاتی ٹارک فراہم کرنے کے لئے گلہری کیج سمیingت پر مشتمل ہے۔ آلے کی ایپلی کیشنز میں استعمال ہوتا ہے۔
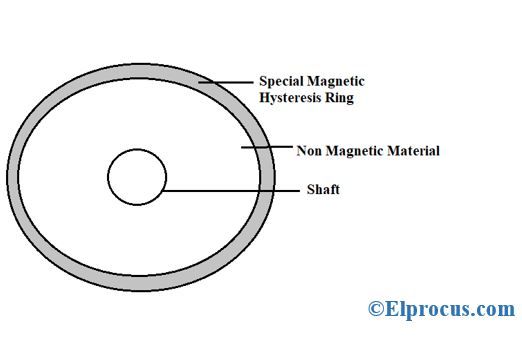
- ہیسٹریسس موٹرز خود شروع کرنے والی موٹریں ہیں۔ یہاں روٹر اعلی ہم آہنگی مقناطیسی سخت کوبالٹ اسٹیل سے بنا ہوا ہموار سلنڈر ہے۔ یہ موٹریں مہنگی ہیں اور مستعمل ہیں جہاں مستقل تیز رفتار کی ضرورت ہوتی ہے۔ عام طور پر servomotors کے طور پر استعمال کیا جاتا ہے.
ڈی سی کرنٹ پرجوش موٹر
یہاں روٹر براہ راست پرچی بجتی ہے کے ذریعے فراہم کردہ DC کرنٹ کا استعمال کرتے ہوئے پرجوش ہوتا ہے۔ AC انڈکشن اور ریکٹفایرس بھی استعمال ہوتے ہیں۔ یہ عام طور پر بڑے سائز کے ہوتے ہیں جیسے 1 ہارس پاور سے زیادہ وغیرہ۔

ہم وقت ساز موٹرز کی درخواستیں
عام طور پر ، ہم وقت ساز موٹریں ایسی ایپلی کیشنز کے لئے استعمال کیا جاتا ہے جہاں عین مطابق اور مستقل رفتار کی ضرورت ہوتی ہے۔ ان موٹروں کی کم پاور ایپلی کیشنز میں پوزیشننگ مشینیں شامل ہیں۔ یہ روبوٹ میں بھی لگائے جاتے ہیں actuators . بال ملز ، گھڑیاں ، ریکارڈ پلیئر ٹرنٹیبل بھی ہم وقت ساز موٹرز کا استعمال کرتے ہیں۔ اس کے علاوہ یہ موٹریں سرووموٹرس اور ٹائمنگ مشینوں کے طور پر بھی استعمال ہوتی ہیں۔
یہ موٹرز اعلی طاقت صنعتی سائز کی حد سے تھوڑا سا ہارسشو سائز کی حد میں دستیاب ہیں۔ اعلی طاقت کے صنعتی سائز میں استعمال ہونے کے دوران ، یہ موٹریں دو اہم کام انجام دیتی ہیں۔ ایک AC توانائی کو مکینیکل توانائی میں تبدیل کرنے کا ایک موثر ذریعہ ہے اور دوسرا پاور فیکٹر اصلاح . آپ سرووموٹر کی کس درخواست کو لے کر آئے ہیں؟