مضمون کے اس حصے میں ہم الیکٹرک گاڑیوں میں پیڈل پریس میکانزم کو اسی طرح مختلف برقی سگنل میں تبدیل کرنے کے ایک جدید طریقہ کے بارے میں جانتے ہیں ، جو گاڑی کے تیز رفتار کنٹرول پر عملدرآمد کے لئے مزید استعمال ہوسکتی ہے۔
وضاحت شدہ تصور الیکٹرانک ایکسلریٹر کی طرح کام کرے گا ، جو پیڈل آہستہ آہستہ دبائے جانے پر گاڑی کی رفتار کو یکساں طور پر بڑھے گا ، اور اس کے برعکس ، پی ڈبلیو ایم ٹکنالوجی کا استعمال کرتے ہوئے
اس خیال کی درخواست مسٹر لوکیش مینی نے کی تھی
تکنیکی خصوصیات
میں ایک مکینیکل لڑکا ہوں ، فی الحال الیکٹرک گاڑی پر کام کرتا ہوں اور میں پیڈل کے ذریعے اپنی موٹر کی رفتار کو کنٹرول کرنا چاہتا ہوں۔ مجھے اپنی موٹر کے لئے کنٹرولر نہیں مل رہا ہے ، براہ کرم مجھے خود بنانے میں مدد کریں میں بہت زیادہ ہوں گا
شکر گزار
موٹر نردجیکرن 36 وولٹ ، 43 کیمپس اور 1.5 ایچ پی برشڈ ڈی سی موٹر ہیں۔
مکینیکل ڈیزائن
پیڈل ایکسلریٹر کا ایک الیکٹرانک ورژن بنیادی طور پر پیڈل کے مکینیکل دبانے کو پہلے سے اسی طرح کے مختلف برقی سگنل میں تبدیل کرنے کے لئے ایک طریقہ کار کی ضرورت ہوگی ، تاکہ اس سگنل کو عملی رفتار کے کنٹرول میں مطلوبہ تبادلوں کے لئے سگنل پروسیسر مرحلے کے ذریعہ عمل میں لایا جاسکے۔ گاڑی
بہت سے تصورات کو آزمایا جاسکتا ہے جیسے پیزو لوڈ سینسر کا استعمال کرکے ، ایک اہلیت کا بوجھ سینسر ، ایک گونج سنسر وغیرہ۔ اس مضمون میں ہم ایک بہت ہی آسان طریقہ سیکھیں گے جس نے میرے ذریعہ وضع کیا ہے جس میں ایل ای ڈی / ایل ڈی آر اسمبلی شامل ہے۔ .

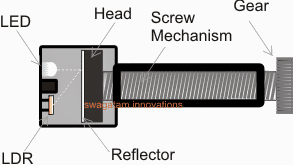
مندرجہ بالا اعداد و شمار میں دکھائے گئے الیکٹرو مکینیکل انتظامات میں ، ہم مندرجہ ذیل مربوط اجزاء کو دیکھنے کے اہل ہیں۔
ایک سکرو میکانزم کے ساتھ منسلک ایک چھوٹا سا گیئر۔
ایک سفید چٹائی کی عکاس سطح کے حامل سکرو کا سر
ایک ایل ای ڈی / ایل ڈی آر اسمبلی اسکرو ہیڈ کے سامنے پوزیشن میں ہے۔
مجوزہ طریقہ کار کس طرح کام کرتا ہے۔
مندرجہ بالا اعداد و شمار میں دکھائے گئے گئر کو دوسرے گیئر کے ساتھ لاک کرنا ہے جس کا تناسب اس گیئر سے 10 گنا زیادہ ہوسکتا ہے۔
بڑے گیئر کو پیڈل میکانزم کے ساتھ تشکیل کرنے کی ضرورت ہے جیسے یہ پیڈل کو دبانے کے جواب میں گھماؤ حرکت شروع کردے۔
گیئرز سے گھماؤ ردعمل بدلے میں اس چیمبر کے اس پار جہاں سکریو سر کی آگے کی حرکت پیدا ہوگی جہاں ایل ای ڈی / ایل ڈی آر اسمبلی واقع ہے۔
اس عمل کی وجہ سے ایل ڈی آر کے ذریعہ ایل ای ڈی سے حاصل ہونے والی روشنی کی متناسب مقدار میں مختلف مقدار پیدا ہوجائے گی۔
پیڈل ڈپریشن کے مطابق یہ مختلف اعداد و شمار (مختلف مزاحمت کی شکل میں) پھر مخصوص گاڑی کے تیز رفتار کنٹرول کو نافذ کرنے کے ل a سگنل پروسیسر سرکٹ کو کھلایا جاسکتا ہے۔
میں اگلی پوسٹ ہم PWM تکنیک کا استعمال کرتے ہوئے سگنل پروسیسر کا مرحلہ سیکھیں گے۔
میں سیکشن کے اوپر ہم نے پیڈل ایکشن کو متناسب طور پر مختلف برقی سگنل میں تبدیل کرنے کے لئے ایک سادہ الیکٹرو مکینیکل کنورٹر اسمبلی کے بارے میں سیکھا۔
پیڈل ایکشن کو پی ڈبلیو ایم میں تبدیل کرنا
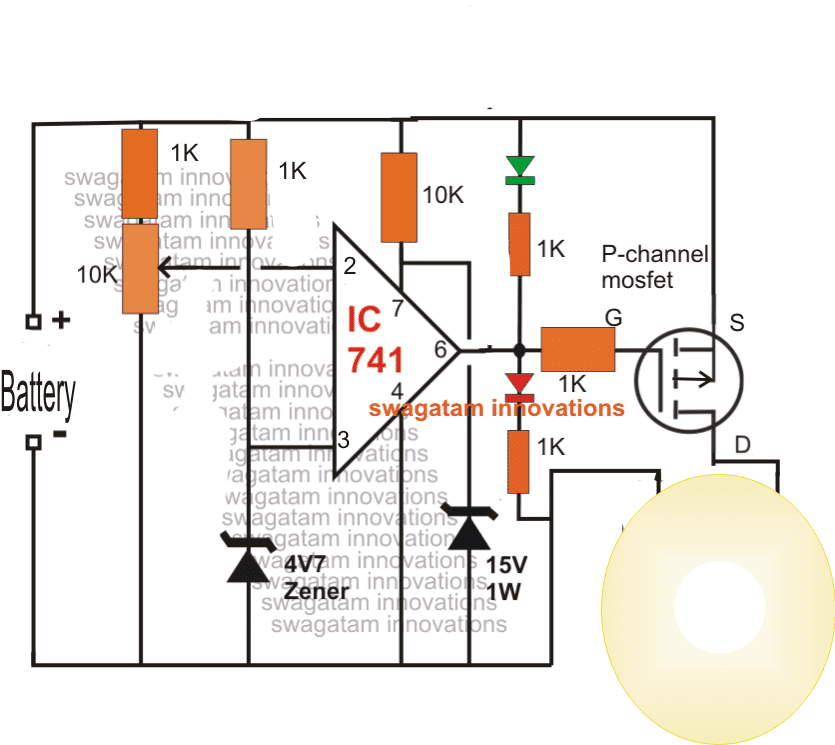
آئیے اب اس سرکٹ پر عمل درآمد کا مطالعہ کریں جس سے ہم پیڈیکل الیکٹرک سگنل کو اسی طرح مختلف پی ڈبلیو ایم سگنل میں تبدیل کرسکیں گے جو گاڑی کے تیز رفتار کنٹرول کے لئے چاہتے ہیں۔

مذکورہ بالا سرکٹ ڈایاگرام کا حوالہ دیتے ہوئے ہم درج ذیل نکات کی مدد سے سرکٹ آپریشن کا اندازہ کرسکتے ہیں۔
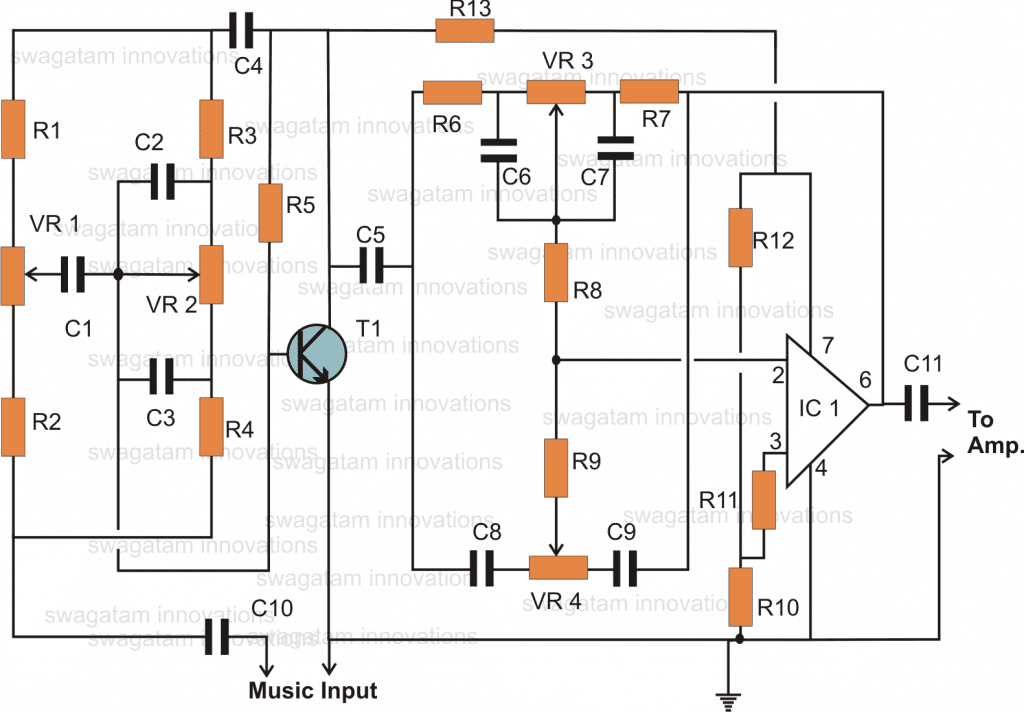
آئی سی 1 کو 80 ہ ہرٹز پلس جنریٹر کے طور پر تشکیل دیا گیا ہے جس میں ڈیوٹی سائیکل کے طور پر زیادہ سے زیادہ وقت اور کم سے کم وقت ہوتا ہے
آئی سی 2 کو ایک موازنہ کے طور پر دھاندلی کی گئی ہے جو پہلے اس کی پن 2 پر لگائی گئی مذکورہ بالا 80 ہرٹج پلس کو اپنے پن 6 پر پیدا ہونے والی مثلث کی لہروں کے ساتھ تبدیل کرتی ہے اور اس کے پن 5 پر دستیاب ماڈیولنگ وولٹیج کے ساتھ مثلث کی لہروں کا موازنہ کرتی ہے۔
پن 5 ماڈیولنگ وولٹیج ایک بی جے ٹی بی سی 547 e emitter سے ماخوذ ہے جو پیڈل کی کارروائیوں سے حاصل کردہ LDR آدانوں کے ساتھ منسلک اس کی بنیاد کے ساتھ ایک عام جمع کنندہ کے طور پر تشکیل دیا گیا ہے۔
پیڈل پریسنگ کے جواب میں مختلف مزاحمت کا موازنہ 100K پیش سیٹ ترتیب کے ساتھ کیا جاتا ہے اور ٹرانجسٹر کی بنیاد پر وولٹیج کا متناسب تناسب تیار کیا جاتا ہے جو کم حالیہ ان پٹ کو آئی سی 2 کے پن 5 سے زیادہ مساوی اعلی موجودہ سگنل میں تبدیل کرتا ہے۔
یہ فوری طور پر ممکنہ سطح کو قبول کیا جاتا ہے اور اس پر عملدرآمد IC2 کے ذریعہ مسفٹ اور منسلک موٹر کے لئے پی ڈبلیو ایم سگنل کی متناسب تناسب پیدا کرتا ہے۔
گاڑی کی پیڈل دبانے کے جواب میں موٹر سپیڈ کو کنٹرول اور مختلف اتار چڑھاؤ والے پی ڈبلیو ایم کے مطابق مختلف کیا جاتا ہے۔
مذکورہ بالا طریقہ کار پیڈل کی کارروائیوں کو موثر انداز میں گاڑی کی موٹر اور اس کی رفتار کے ایک کنٹرول آپریشن میں تبدیل کرتا ہے۔
سرکٹ کیسے مرتب کریں۔
یہ بہت آسان ہے.
- پیڈل کو اس کے زیادہ سے زیادہ نقطہ پر دبائیں جیسے سکریو سر ایل ای ڈی / ایل ڈی آر اسمبلی کے سامنے قریب ترین ممکنہ پوزیشن تک پہنچ جائے۔
- اگلا 100k پری سیٹ ایڈجسٹ کریں جب تک کہ IC2 کا پن 3 زیادہ سے زیادہ چوڑائی کے ساتھ پی ڈبلیو ایم پیدا کرنا شروع کردے ، اس کی تصدیق پن3 پر وولٹیج کی پیمائش کرکے سرکٹ کی سپلائی وولٹیج کے قریب سے زیادہ سے زیادہ قریب ہونے کی تصدیق کی جاسکتی ہے ، یعنی 5V۔
- ایک بار جب یہ کام ہوجائے تو ، ترتیب دینے کا عمل مکمل ہونے کا فرض کیا جاسکتا ہے۔
- نتائج کی تصدیق اب مختلف سطحوں پر پیڈل دبانے اور موٹر سپیڈ کی جانچ کرکے ایک جیسے انداز میں ہوتی ہے۔
پچھلا: سادہ ESR میٹر سرکٹ اگلا: گرا لائٹ سرکٹ کیسے بنائیں؟