اس پروجیکٹ میں ہم ایک سروو موٹر کی بنیادی خصوصیات اور 555 ٹائمر آئی سی ، اور پش بٹنوں کے ایک جوڑے کا استعمال کرکے سروو موٹر کو چلانے کا طریقہ سیکھنے جا رہے ہیں۔
انکیت نیگی
کیوں خدمت؟
امدادی موٹریں مختلف شعبوں میں استعمال ہوتے ہیں۔ یہ بنیادی طور پر ان علاقوں میں ایکچیوٹرز کے طور پر استعمال ہوتے ہیں جہاں آؤٹ پٹ بوجھ کو کنٹرول کرنے کے لئے ہمیں ایک عین مطابق حرکت کی ضرورت ہے۔
اس کی بہترین مثال آر سی کار ہے۔ آئیے دیکھیں کہ آپ 45 ڈگری کی تحریک چاہتے ہیں ، کم نہیں۔ اس صورت میں آپ ایک عام سی ڈی سی موٹر استعمال نہیں کرسکتے ہیں کیونکہ جب بھی آپ طاقت کریں گے تو یہ مطلوبہ پوزیشن کو اوورشوٹ کرے گا۔
اور اس طرح اس کام کو حاصل کرنے کے ل we ہمیں ایک سروو موٹر کی ضرورت ہے کیونکہ اس سے نہ صرف 45 ڈگری کی گردش ہوگی بلکہ مطلوبہ مقام پر آسانی سے رک جائے گی۔

کچھ تکنیکی نکات ایک نا معلوم ہونا ضروری ہے:
ا) سروو خریدنے یا استعمال کرنے سے پہلے کسی کو یہ جان لینا چاہئے کہ اس کے اندر کیا ہے اور یہ کس طرح کام کرتا ہے۔ ایک سرو موٹر تین اہم اجزاء پر مشتمل ہے:
1. ایک ڈی سی موٹر
2. 1 پوٹینومیٹر ، یا تو ینالاگ یا ڈیجیٹل
3. کنٹرول سرکٹ
ب) سروو موٹر سے نکلنے والی کل 3 تاروں ہیں۔
1. سرخ: فراہمی کے مثبت
2. بلیک: سپلائی کے منفی
3. اورنج یا پیلے رنگ: ایک حوالہ وولٹیج سے منسلک ہے ، یعنی ایک پی ڈبلیو ایم ماخذ
ج) سروو موٹر کسی بھی سمت میں 90 ڈگری کو گھوم سکتا ہے ، زیادہ سے زیادہ 180 ڈگری کا احاطہ کرتا ہے ، یعنی گھڑی کی سمت میں یا تو 90 ڈگری یا 90 ڈگری اینٹلوک سمت اپنی غیر جانبدار پوزیشن سے۔
موٹر گھڑی کی سمت میں گھومنے کے ل clock ، گھڑی کے پلس کے اوقات میں 1.5 ملی سیکنڈ سے زیادہ ہونا ضروری ہے اور اسے گھومنے کے ل time وقت کی مدت میں 1.25 ملی سیکنڈ سے کم ہونا چاہئے لیکن فریکوینسی 50 سے 60 ہرٹز کے درمیان رہنی چاہئے۔
اور اس طرح ہم ہمارے لئے اس طرح کی گھڑی کی دالیں تیار کرنے کیلئے 555 ٹائمر استعمال کرنے جارہے ہیں۔
اس منصوبے کے لئے مطلوبہ اجزاء:
1. سرور موٹر
دو 555 ٹائمر
3. 6 ووٹ بیٹری
4. دو پش بٹن
5. ریسرچس: 1K ، 4.7K ، 33K ، 10K ، 68K ، تمام 1/4 واٹ 5٪
6. ایک مترجم (BC547)
7. دو درجے کے 0.1،5 کیپایٹرس
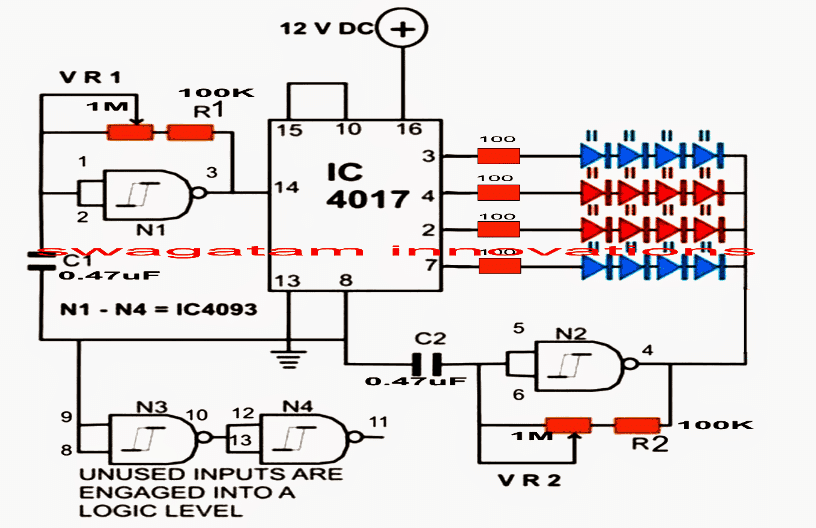
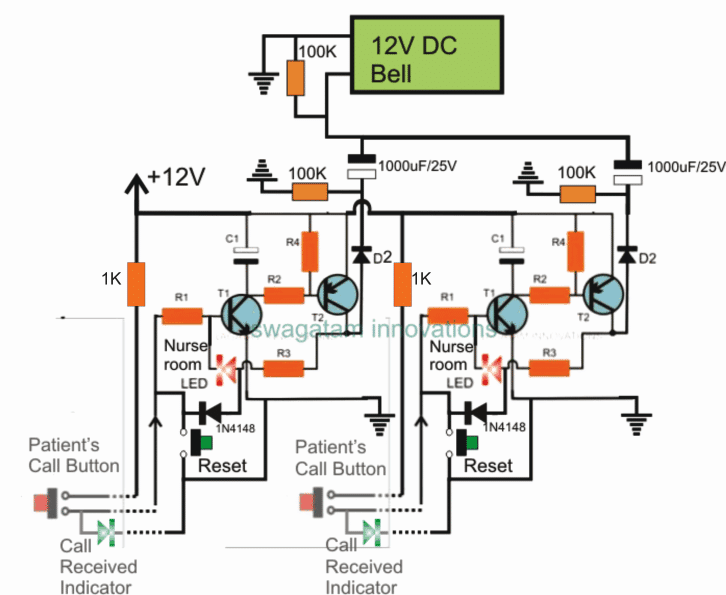
سرکیوٹ ڈایاگرام دکھا رہا ہے کہ آئی سی 555 استعمال کرنے والے موٹو موٹر کیسے چل سکتے ہیں:

جیسا کہ اوپر دکھایا گیا سرکٹ آریھ میں دکھایا گیا ہے کنکشن بنائیں۔
موٹر کے مثبت اور منفی پن کو بالترتیب بیٹری کے مثبت اور منفی ٹرمینل سے مربوط کریں۔ اور سگنل یا حوالہ پن کو ٹرانجسٹر کے کلکٹر ٹرمینل سے مربوط کریں۔
سرکٹ کام:
1. جب فارورڈ پش بٹن دبایا جاتا ہے-
جب یہ معاملہ پیدا ہوتا ہے تو 68 K مزاحم ڈسچارج اور دہلیش پن کے مابین جڑ جاتے ہیں۔ اب ابتدا میں کاپاکیٹر چارج نہیں کیا جاتا ہے لہذا پن 2 0 وولٹ پر ہے جو اطلاق شدہ وولٹیج میں 1 بائی 3 سے کم ہے۔
یہ 555 کے اندر پلٹائیں فلاپ کو دوبارہ سیٹ کرتا ہے اور آؤٹ پٹ ٹرمینل میں منطق 1 فراہم کرتا ہے جس پر ٹرانجسٹر کی بنیاد منسلک ہے۔
اس کی وجہ سے ٹرانجسٹر آن ہو جاتا ہے اور براہ راست زمین پر کرنٹ چلتا ہے جس کی وجہ سے موٹر کے سگنل پن کو صفر وولٹ مل جاتا ہے کیونکہ یہ پن براہ راست کلکٹر ٹرمینل سے جڑا ہوا ہے۔
چونکہ کپیسیٹر چارج کرنا شروع کرتے ہیں جب آؤٹ پٹ 1 ہوتا ہے ، آؤٹ پٹ 0 ہوجاتا ہے جیسے ہی کاکیسیٹر کے پار وولٹیج کا اطلاق 2 فیصد 3 سے زیادہ ہوجاتا ہے کیونکہ یہ براہ راست دہلیز پن سے منسلک ہوتا ہے۔
اب ٹرانجسٹر آف ہوگا اور سگنل پن سے منطق 1 مل جائے گا۔
اس طرح سے پی ڈبلیو ایم سگنل تیار ہوتے ہیں موٹر کے حوالہ پن پر۔ اب اس معاملے میں پیدا شدہ نبض کی مدت مدت 1.5 ملی سیکنڈ سے زیادہ ہے ، جس کا آپ 555 کے لئے ڈیوٹی سائیکل فارمولے کے حساب سے حساب کرسکتے ہیں۔ اور اس طرح ہمیں موٹر کی 90 ڈگری گھڑی کی گردش ملتی ہے جیسا کہ مذکورہ پیراگراف میں بیان کیا گیا ہے۔
1. جب پسماندہ پش بٹن دب جاتا ہے-
جب یہ معاملہ پیدا ہوتا ہے تو 10 K کے ریزٹر ڈسچارج اور تھریشولڈ پن کے درمیان جڑ جاتے ہیں جو 68k اوہم ریزسٹر سے کم ہے۔ اس طرح اس معاملے میں نبض کا وقتی مدت 1.5 ملی سیکنڈ سے بھی زیادہ سبق ہے ، جس کا آپ 555 کے لئے ڈیوٹی سائیکل فارمولے کے حساب سے حساب کرسکتے ہیں۔
اب pwm موٹر کے حوالہ پن پر اسی طرح تیار ہوتا ہے جیسا کہ مذکورہ بالا معاملے میں ہے۔ اور اس طرح ہمیں موٹر کی 90 ڈگری اینٹلوکائیٹ گردش ملتی ہے جیسا کہ اوپر والے پیراگراف میں بیان کیا گیا ہے۔
** دونوں ہی صورتوں میں تعدد 40 سے 60 ہرٹز کے درمیان ہے
پچھلا: 2.4 گیگا ہرٹز 10 چینل ریموٹ کنٹرول سوئچ اگلا: کومپیکٹ 3-فیز IGBT ڈرائیور IC STGIPN3H60 - ڈیٹا شیٹ ، پن آؤٹ