یہ روبوٹک آرم سرکٹ جس کو روبوٹک کرین کی طرح بھی لاگو کیا جاسکتا ہے ، 6 سرو موٹرز کا استعمال کرتے ہوئے کام کرتا ہے اور اس کے ذریعے اسے کنٹرول کیا جاسکتا ہے مائکروکنٹرولر ریموٹ کنٹرول ، ایک اردوینو پر مبنی 2.4 گیگا ہرٹز مواصلاتی لنک استعمال کرنا۔
اہم خصوصیات
جب آپ کسی روبوٹ بازو کی طرح نفیس چیز بنا رہے ہو تو ، اس میں جدید نظر آنا چاہئے اور اس میں بہت سی جدید خصوصیات شامل ہونی چاہئیں ، اور نہ صرف ایک کھلونا بلکہ افعال کی طرح۔
مجوزہ مکمل ڈیزائن تیار کرنا نسبتا easy آسان ہے ، پھر بھی اسے کچھ جدید تدبیروں سے منسوب کیا جاتا ہے ، جو وائرلیس یا ریموٹ کنٹرول کمانڈ کے ذریعے ٹھیک طور پر قابو پایا جاسکتا ہے۔ اگر صنعتی استعمال کے ل the موٹرز کو مناسب طریقے سے اپ گریڈ کیا گیا ہو تو یہ ڈیزائن بھی مطابقت رکھتا ہے۔
روبوٹک بازو جیسے اس مکینیکل کرین کی اہم خصوصیات یہ ہیں:
- 180 ڈگری عمودی محور پر مستقل طور پر ایڈجسٹ 'بازو'۔
- 180 ڈگری عمودی محور پر مستقل طور پر ایڈجسٹ 'کہنی' بنائیں۔
- 90 ڈگری عمودی محور پر مستقل طور پر ایڈجسٹ 'فنگر چوٹکی' یا گرفت۔
- 180 ڈگری افقی طیارے پر مستقل طور پر ایڈجسٹ 'بازو'۔
- مکمل روبوٹک نظام یا کرین کا بازو حرکت پذیر اور قابل مشق ہے جیسے ریموٹ کنٹرول کار .
کسی نہ کسی طرح کے کام کرنے کا انکار
مندرجہ بالا وضاحت کی گئی کچھ خصوصیات کو مندرجہ ذیل GIF تخروپن کی مدد سے دیکھا اور سمجھا جاسکتا ہے:

موٹر میکانزم کی پوزیشنیں
مندرجہ ذیل اعداد و شمار ہمیں موٹر کی مختلف پوزیشنوں اور اس سے منسلک گیئر میکانزم کے بارے میں واضح تصویر پیش کرتے ہیں جن کو پراجیکٹ پر عمل درآمد کے ل for انسٹال کرنے کی ضرورت ہے۔

اس ڈیزائن میں ہم چیزوں کو ہر ممکن حد تک آسان رکھنے کو یقینی بناتے ہیں تاکہ عام آدمی بھی اس میں شامل موٹر / گیئر میکانزم کے بارے میں سمجھنے کے قابل ہو۔ اور پیچیدہ طریقہ کار کے پیچھے کچھ بھی پوشیدہ نہیں ہے۔
مندرجہ ذیل نکات کی مدد سے ہر موٹر کے کام یا کام کو سمجھا جاسکتا ہے۔
- موٹر # 1 روبوٹ کے 'فنگر چوٹکی' یا گرفت کا نظام کنٹرول کرتا ہے۔ حرکت پذیر عنصر کو حرکت کے ل directly موٹر کے شافٹ کے ساتھ براہ راست باندھا جاتا ہے۔
- موٹر # 2 نظام کی کہنی کے طریقہ کار کو کنٹرول کرتا ہے۔ لفٹنگ کی تحریک کو نافذ کرنے کے ل eg یہ ایک آسان کنارے کے ساتھ ایڈیڈ گیئر سسٹم کے ساتھ تشکیل دیا گیا ہے۔
- موٹر # 3 پورے روبوٹک بازو سسٹم کو عمودی طور پر اٹھانے کے لئے ذمہ دار ہے ، لہذا اس موٹر کو مذکورہ دونوں سے کہیں زیادہ طاقتور ہونے کی ضرورت ہے۔ یہ موٹر مطلوبہ افعال کی فراہمی کے لئے گیئرز میکانزم کا استعمال کرتے ہوئے بھی مربوط ہے۔
- موٹر # 4 پورے 360 ڈگری افقی طیارے پر کرین کے پورے میکانزم کو کنٹرول کرتا ہے ، تاکہ بازو کسی بھی شے کو پوری طرح سے چننے یا اٹھانے کے قابل ہو گھڑی کی سمت یا اینٹی کلاک وائی شعاعی حد
- موٹر # 5 اور 6 پلیٹ فارم کے پہیے کی طرح کام کرتا ہے جو پورا سسٹم لے جاتا ہے۔ بغیر کسی آسانی کے نظام کو ایک جگہ سے دوسری جگہ منتقل کرکے ان موٹروں کو قابو کیا جاسکتا ہے ، اور یہ بائیں / دائیں موٹروں کی رفتار کو ایڈجسٹ کرکے سسٹم کے مشرق / مغرب ، شمال / جنوب کی نقل و حرکت کو بھی سہولت فراہم کرتا ہے۔ یہ محض دو موٹروں میں سے کسی ایک کو کم کرکے یا اسے روکنے کے ذریعہ کیا جاتا ہے ، مثال کے طور پر دائیں طرف کی باری شروع کرنے کے لئے ، دائیں طرف کی موٹر کو اس وقت تک روک یا بند کیا جاسکتا ہے جب تک کہ موڑ مکمل طور پر یا مطلوبہ زاویہ پر عمل نہ ہوجائے۔ اسی طرح ، بائیں موڑ کو شروع کرنے کے لئے بائیں موٹر سے بھی ایسا ہی کریں۔
پچھلے پہیے میں اس کے ساتھ کوئی موٹر وابستہ نہیں ہے ، اسے اپنے مرکزی محور پر آزادانہ طور پر حرکت کرنے اور فرنٹ وہیل مشقوں کی پیروی کرنے کا اشارہ ہے۔
وائرلیس وصول کرنے والا سرکٹ
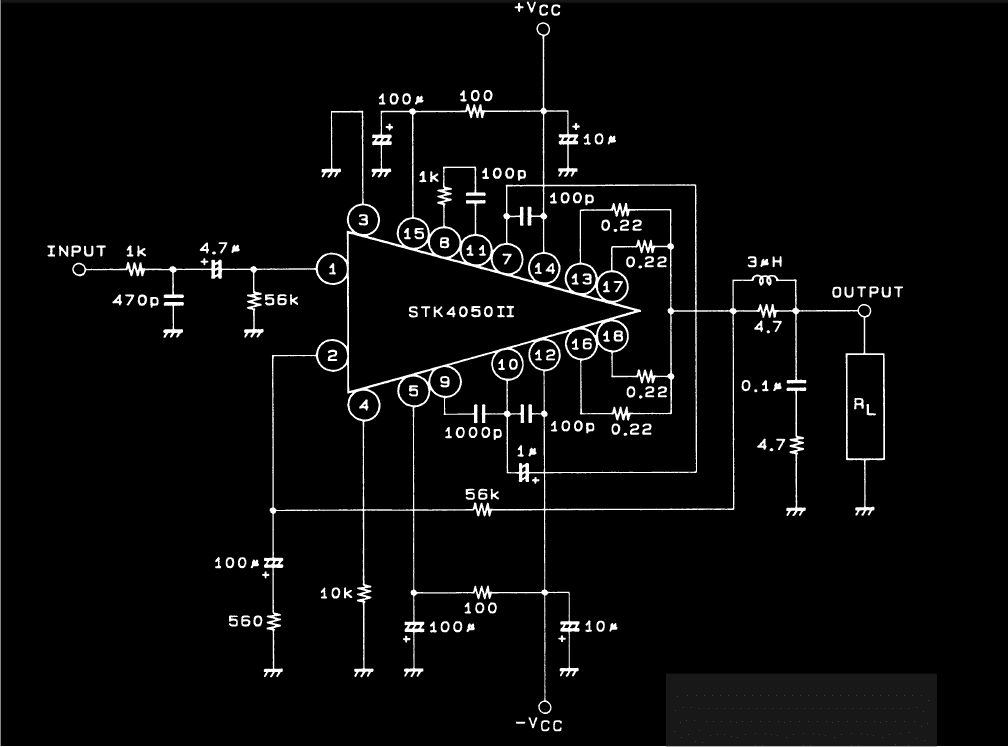
چونکہ پورا نظام ریموٹ کنٹرول کے ساتھ کام کرنے کے لئے ڈیزائن کیا گیا ہے ، لہذا مذکورہ بالا وضاحت شدہ موٹروں کے ذریعہ ایک وائرلیس رسیور کو مرتب کرنے کی ضرورت ہے۔ اور یہ مندرجہ ذیل اردوینو پر مبنی سرکٹ کا استعمال کرتے ہوئے کیا جاسکتا ہے۔

جیسا کہ آپ دیکھ سکتے ہیں ، اردوینو آؤٹ پٹس کے ساتھ 6 سرو موٹرز منسلک ہیں اور اس میں سے ہر ایک کو منسلک سینسر NRF24L01 کے ذریعہ حاصل کردہ ریموٹ کنٹرول سگنلز کے ذریعے کنٹرول کیا جاتا ہے۔
اس سینسر کے ذریعہ سگنلز پر کارروائی کی جاتی ہے اور ارڈینو کو کھلایا جاتا ہے جو پروسیسنگ کو مطلوبہ اسپیڈ کنٹرول آپریشنز کے لئے متعلقہ موٹر کو فراہم کرتا ہے۔
Thsignals ایک ٹرانسمیٹر سرکٹ سے بھیجا جاتا ہے جس میں صلاحیت موجود ہے۔ ان پوٹاینومیٹر پر ایڈجسٹ مینسٹ مذکورہ بالا وضاحت شدہ رسیور سرکٹ کے ساتھ منسلک کارپسندنگ موٹرز پر رفتار کی سطح کو کنٹرول کرتے ہیں۔
اب دیکھتے ہیں کہ ٹرانسمیٹر سرکٹ کیسا لگتا ہے:
ٹرانسمیٹر ماڈیول

ٹرانسمیٹر ڈیزائن میں اس کے ارڈینو بورڈ کے ساتھ 6 پوٹینومیٹر منسلک ہوتے ہوئے اور 2.4 گیگا ہرٹز مواصلات لنک آلہ کے ساتھ دیکھا جاسکتا ہے۔
ہر ایک برتن کے لئے پروگرام کیا گیا ہے اسی موٹر کو کنٹرول کرنا وصول کنندہ سرکٹ سے وابستہ۔ لہذا جب صارف ٹرانسمیٹر کے منتخب کردہ پوٹینومیٹر کے شافٹ کو گھوماتا ہے تو ، روبوٹک بازو کی متعلقہ موٹر اس نظام پر اپنی مخصوص پوزیشن پر منحصر عمل کو حرکت میں لانے اور اس پر عمل درآمد شروع کردیتی ہے۔
موٹر اوورلوڈنگ کو کنٹرول کرنا
آپ حیران ہوسکتے ہیں کہ موٹرس اپنی حرکتی حدود میں اپنی حرکت کو کس طرح محدود کردیتی ہیں ، کیوں کہ جب نظام کی متعلقہ حرکات اپنے اختتامی مقامات پر پہنچ جائیں تو موٹر کو اوورلوڈنگ سے روکنے کا کوئی محدود انتظام نہیں ہے؟
مطلب ، مثال کے طور پر ، اگر 'گرفت' نے اعتراض کو مضبوطی سے تھامے رکھنے کے بعد بھی موٹر بند نہیں ہوا تو کیا ہوتا ہے؟
اس کا آسان ترین حل یہ ہے کہ فرد کو شامل کیا جائے موجودہ کنٹرول ماڈیولز موٹروں میں سے ہر ایک کے ساتھ تاکہ ایسی صورتحال میں موٹر سوئچ رہ جائے اور بغیر جلائے یا اوورلوڈنگ کے بند ہوجائے۔
ایک موجودہ حالیہ قابو پانے کی وجہ سے موٹریں اوورلوڈ ، یا زیادہ حالیہ حالات سے نہیں گذرتی ہیں اور وہ ایک مخصوص محفوظ حد میں کام کرتی رہتی ہیں۔
پروگرام کا مکمل کوڈ مل سکتا ہے اس مضمون میں
پچھلا: پی سی اسپیکرز کے لئے USB 5V آڈیو یمپلیفائر اگلا: 7 ترمیم شدہ سائن ویو انورٹر سرکٹس دریافت - 100W سے 3KVA