پیش کردہ 3 فیز وی ایف ڈی سرکٹ ( میرے ڈیزائن کردہ ) کسی بھی تین فیز برشڈ AC موٹر یا یہاں تک کہ برش لیس اے سی موٹر کی رفتار کو کنٹرول کرنے کے لئے استعمال کیا جاسکتا ہے۔ اس خیال کی درخواست مسٹر ٹام نے کی تھی
VFD استعمال کرنا
مجوزہ 3 فیز وی ایف ڈی سرکٹ کو عالمی سطح پر زیادہ تر 3 فیز اے سی موٹرز کے لئے لاگو کیا جاسکتا ہے جہاں ریگولیشن کی کارکردگی زیادہ ضروری نہیں ہے۔
اسے خاص طور پر کنٹرول کرنے کے لئے استعمال کیا جاسکتا ہے گلہری کیج انڈکشن موٹر رفتار کھلی لوپ موڈ کے ساتھ ، اور ممکنہ طور پر بند لوپ موڈ میں بھی ، جس پر مضمون کے بعد کے حصے میں تبادلہ خیال کیا جائے گا۔
ماڈیول 3 فیز انورٹر کیلئے درکار ہیں
مجوزہ 3 فیز VFD یا متغیر فریکوئنسی ڈرائیو سرکٹ ڈیزائن کرنے کے لئے درج ذیل بنیادی سرکٹ مرحلے لازمی طور پر ضروری ہیں:
- پی ڈبلیو ایم وولٹیج کنٹرولر سرکٹ
- 3 فیز اونچی سائیڈ / لو سائیڈ H-پل ڈرائیور سرکٹ
- 3 فیز جنریٹر سرکٹ
- V / ہرٹج پیرامیٹر بنانے کیلئے تعدد کنورٹر سرکٹ میں وولٹیج۔
آئیے مندرجہ ذیل وضاحت کی مدد سے مذکورہ بالا مراحل کی کارآمد تفصیلات سیکھیں:
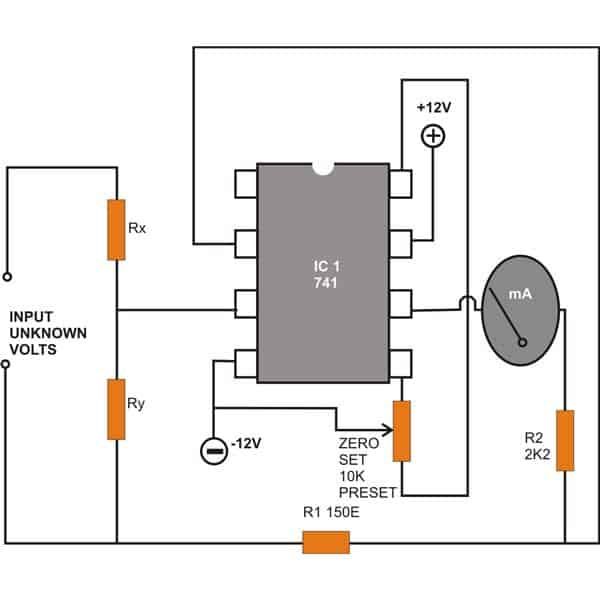
ذیل میں دیئے گئے آریھ میں ایک سادہ پی ڈبلیو ایم وولٹیج کنٹرولر سرکٹ دیکھا جاسکتا ہے۔

PWM کنٹرولر
میں نے پہلے ہی مذکورہ پی ڈبلیو ایم جنریٹر مرحلے کے کام کو شامل اور وضاحت کی ہے جو بنیادی طور پر اسی آئی سی کے پن 5 پر اطلاق کی جانے والی صلاحیت کے جواب میں آئی سی 2 کے پن 3 میں مختلف پی ڈبلیو ایم آؤٹ پٹ پیدا کرنے کے لئے تیار کیا گیا ہے۔
آریگرام میں دکھایا گیا 1K پیش سیٹ آر ایم ایس کنٹرول نوب ہے ، جس کو آئندہ 2 پروسیسنگ کے لئے آئی سی 2 کے پن 3 پر پی ڈبلیو ایم کی شکل میں آؤٹ پٹ وولٹیج کی مطلوبہ متناسب مقدار کے حصول کے لئے مناسب طریقے سے ایڈجسٹ کیا جاسکتا ہے۔ اس سے متعلقہ آؤٹ پٹ تیار کرنے کے لئے سیٹ کیا گیا ہے جو مینز 220V یا 120V AC RMS کے برابر ہوسکتا ہے۔
H-Bridge ڈرائیور سرکٹ
اگلے نیچے دیئے گئے آراگرام میں آئی سی آئی آر ایس 2330 کا استعمال کرتے ہوئے سنگل چپ ایچ پل 3 فیز ڈرائیور سرکٹ دکھایا گیا ہے۔
ڈیزائن سیدھا لگتا ہے کیونکہ زیادہ تر پیچیدگیاں چپس ان بلٹ نفیس سرکٹری کے ذریعہ سنبھالتی ہیں۔
اچھے حساب سے 3 فیز سگنل کا استعمال HIN1 / 2/3 اور لائن 1/2/3 آؤٹس میں 3 مرحلے کے سگنل جنریٹر مرحلے کے ذریعے لگایا جاتا ہے۔
کے نتائج آئی سی آئی آر ایس 2330 6 ماسفٹس یا IGBTs پل نیٹ ورک کے ساتھ مربوط دیکھا جاسکتا ہے ، جس کے نالے موٹر کے ساتھ مناسب طریقے سے تشکیل دیئے گئے ہیں جس پر قابو پانے کی ضرورت ہے۔
برج ماسفٹ مرحلے میں پی ڈبلیو ایم انجیکشن شروع کرنے کے لئے مذکورہ بالا زیربحث پی ڈبلیو ایم جنریٹر سرکٹ اسٹیج کے آئی سی 2 پن # 3 کے ساتھ کم سائیڈ موزفٹ / آئی جی بی ٹی گیٹ کو ضم کیا گیا ہے۔ یہ ضابطہ بالآخر ترتیبات کے مطابق موٹر کو مطلوبہ رفتار حاصل کرنے میں مدد کرتا ہے (پہلے خاکہ میں 1 K پیش سیٹ کے ذریعے)۔

مندرجہ ذیل آریھ میں ہم مطلوبہ 3 مرحلے کے سگنل جنریٹر سرکٹ کا تصور کرتے ہیں۔

3 فیز جنریٹر سرکٹ کی تشکیل
3 مرحلہ جنریٹر CMOS چپس CD4035 اور CD4009 کے ایک جوڑے کے ارد گرد تعمیر کیا گیا ہے جو دکھائے گئے پن آؤٹ کے 3 جہت کے درست سگنل کو درست طریقے سے تیار کرتا ہے۔
3 مرحلے کے اشاروں کی تعدد کھلایا ان پٹ گھڑیوں پر منحصر ہوتی ہے جو مطلوبہ 3 مرحلے کے اشارے سے 6 گنا ہونی چاہئے۔ مطلب ، اگر مطلوبہ 3 مرحلے کی تعدد 50 ہرٹج ہے تو ، ان پٹ گھڑی 50 x 6 = 300 ہرٹج ہونی چاہئے۔
اس سے یہ بھی معلوم ہوتا ہے کہ ڈرائیور آئی سی کی موثر تعدد کو تبدیل کرنے کے ل above مذکورہ بالا گھڑیوں میں مختلف قسم کی ہوسکتی ہے جس کے نتیجے میں موٹر آپریشنل فریکوئینسی میں مختلف نوعیت کا ذمہ دار ہوگا۔
تاہم چونکہ مختلف وولٹیج کے جواب میں مذکورہ بالا تعدد میں ردوبدل کرنے کی ضرورت ہوتی ہے ، لہذا تعدد کنورٹر کے لئے ایک وولٹیج ضروری ہوجاتا ہے۔ اگلے مرحلے میں ضرورت کے نفاذ کے ل frequency فریکوئینسی کنورٹر سرکٹ سے ایک سادہ درست وولٹیج پر تبادلہ خیال کیا جاتا ہے۔
مستقل وی / ایف تناسب کیسے بنائیں
عام طور پر انڈکشن موٹرز میں ، موٹر اسپیڈ اور ٹوک کی زیادہ سے زیادہ کارکردگی کو برقرار رکھنے کے لئے ، پرچی کی رفتار یا روٹر اسپیڈ کو قابو کرنے کی ضرورت ہوتی ہے جس کے نتیجے میں مستقل V / ہرٹج تناسب برقرار رکھنے سے ممکن ہوتا ہے۔ چونکہ ان پٹ سپلائی کی فریکوئنسی سے قطع نظر ، اسٹیٹر مقناطیسی بہاؤ ہمیشہ مستقل رہتا ہے ، لہذا روٹر کی رفتار آسانی سے اس سے قابو پانے والی ہوجاتی ہے V / ہرٹج تناسب مستقل برقرار رکھنا .
کھلی لوپ موڈ میں ، یہ پہلے سے طے شدہ V / ہرٹز تناسب کو برقرار رکھنے اور اس کو دستی طور پر لاگو کرکے تقریبا rough مکمل طور پر کیا جاسکتا ہے۔ مثال کے طور پر پہلے آریھ میں یہ مناسب طور پر R1 اور 1K پیش سیٹ ایڈجسٹ کرکے کیا جاسکتا ہے۔ R1 تعدد کا تعین کرتا ہے اور 1K آؤٹ پٹ کے RMS کو ایڈجسٹ کرتا ہے ، لہذا مناسب طور پر دو پیرامیٹرز کو ایڈجسٹ کرکے ہم مطلوبہ رقم V / Hz دستی طور پر نافذ کرسکتے ہیں۔
تاہم ، انڈکشن موٹر ٹارک اور رفتار کا نسبتا accurate درست کنٹرول حاصل کرنے کے ل we ، ہمیں ایک بند لوپ حکمت عملی کو نافذ کرنا ہوگا ، جس میں پرچی اسپیڈ ڈیٹا کو V / Hz تناسب کی خودکار ایڈجسٹمنٹ کے لئے پروسیسنگ سرکٹ کو کھلایا جانا چاہئے تاکہ اس سے قدر ہمیشہ مستقل قریب ہی رہتی ہے۔
بند لوپ آراء کو نافذ کرنا
اس صفحے پر پہلے آریھ میں بند لوپ خود کار طریقے سے V / ہرٹج ریگولیشن کو ڈیزائن کرنے کے لئے مناسب طریقے سے تبدیل کیا جاسکتا ہے جیسا کہ ذیل میں دکھایا گیا ہے:

مذکورہ اعداد و شمار میں ، آئی سی 2 کے پن نمبر 5 میں ممکنہ طور پر ایس پی ڈبلیو ایم کی چوڑائی کا تعین ہوتا ہے جو ایک ہی IC کے پن # 3 پر تیار ہوتا ہے۔ ایس پی ڈبلیو ایم کو آئی سی 2 کے پن # 7 پر مثلث کی لہر کے ساتھ پن # 5 میں مینز 12 وی لہر کے نمونوں کا موازنہ کرکے پیدا کیا گیا ہے ، اور موٹر کنٹرول کے ل for اس کو نچلے سائیڈ والے مچھوں کو کھلایا جاتا ہے۔
ابتدائی طور پر یہ ایس پی ڈبلیو ایم کچھ ایڈجسٹ لیول (1K پرسیٹ کا استعمال کرتے ہوئے) پر سیٹ کیا گیا ہے جو مخصوص برائے نام کی رفتار کی سطح پر روٹر حرکت شروع کرنے کے لئے 3 فیز پل کے نچلے سائیڈ IGBT گیٹس کو متحرک کرتا ہے۔
جیسے ہی روٹر روٹر گھومنے لگتا ہے ، روٹر میکانزم کے ساتھ منسلک ٹیکومیٹر آئی سی 2 کے پن # 5 پر متناسب اضافی وولٹیج کی نشوونما کا سبب بنتا ہے ، اس تناسب سے ایس پی ڈبلیو ایم کو وسیع تر ہوجاتا ہے جس کی وجہ سے موٹر کے اسٹیٹر کنڈلی میں زیادہ وولٹیج ہوتی ہے۔ یہ روٹر کی رفتار میں مزید اضافے کا سبب بنتا ہے جس کی وجہ سے آئی سی 2 کے پن # 5 پر زیادہ وولٹیج ہوتی ہے ، اور یہ تب تک چلتا ہے جب تک کہ ایس پی ڈبلیو ایم کے برابر ولٹیج میں اضافہ نہیں ہوتا ہے اور اسٹیٹر روٹر ہم آہنگی مستحکم حالت کو حاصل نہیں کرتی ہے۔
مذکورہ بالا طریقہ کار موٹر کے آپریشنل ادوار میں خود کو ایڈجسٹ کرتا ہے۔
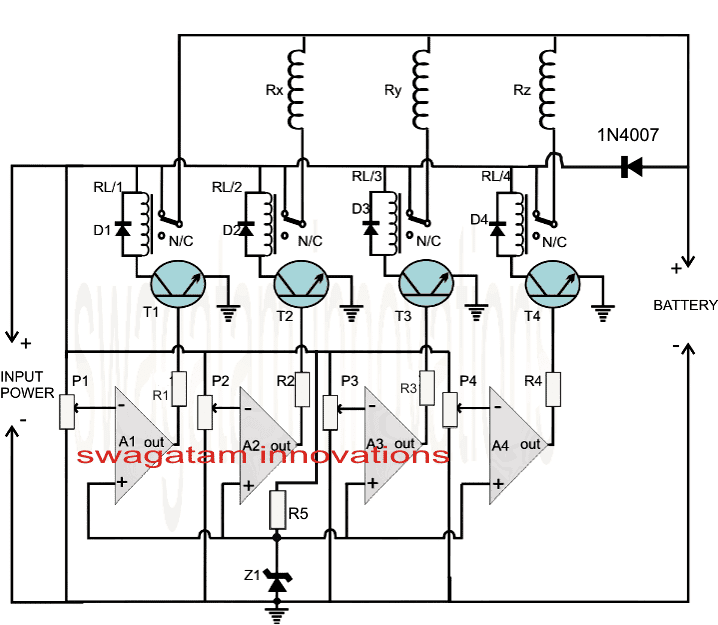
ٹیکومیٹر بنانے اور انٹیگریٹ کرنے کا طریقہ
مندرجہ ذیل آراگرام میں ایک سادہ ٹیکومیٹر ڈیزائن دیکھا جاسکتا ہے ، اس کو روٹر میکنزم کے ساتھ مربوط کیا جاسکتا ہے جیسے گھورنے والی تعدد BC547 کی بنیاد کو کھلانا کرنے کے قابل ہے۔

یہاں روٹر اسپیڈ ڈیٹا ہال اثر سینسر یا آئی آر ایل ای ڈی / سینسر نیٹ ورک سے جمع کیا جاتا ہے اور اسے ٹی 1 کی بنیاد پر کھلایا جاتا ہے۔
ٹی 1 اس فریکوئینسی پر چکر لگاتا ہے اور آئی سی 555 مونوسٹ ایبل سرکٹ کو مناسب طریقے سے تشکیل دے کر بنائے گئے ٹیکومیٹر سرکٹ کو چالو کرتا ہے۔
مذکورہ ٹیکومیٹر سے حاصل ہونے والی پیداوار میں ٹی 1 کی بنیاد پر ان پٹ فریکوینسی کے جواب میں متناسب ہوتا ہے۔
چونکہ تعدد انتہائی دائیں جانب D3 آؤٹ پٹ پر وولٹیج میں اضافہ ہوتا ہے اور اس کے برعکس ، اور V / ہرٹج تناسب کو نسبتا مستقل سطح پر رکھنے میں مدد کرتا ہے۔
رفتار کو کیسے کنٹرول کیا جائے
آئی سی 4035 کے گھڑی ان پٹ پر تعدد ان پٹ میں ردوبدل کرکے مستقل V / F کا استعمال کرتے ہوئے موٹر کی رفتار حاصل کی جاسکتی ہے۔ یہ کسی IC 555 حیرت انگیز سرکٹ یا کسی بھی معیاری حیرت انگیز سرکٹ سے گھڑی کے ان پٹ کو متغیر فریکوئینسی کھلا کر حاصل کیا جاسکتا ہے۔ آئی سی 4035۔
تعدد کو تبدیل کرنے سے موٹر کی آپریٹنگ فریکوئینسی مؤثر طریقے سے بدل جاتی ہے جو اسی طرح پرچی کی رفتار کو کم کرتی ہے۔
اس کا پتہ ٹیکومیٹر کے ذریعہ لگایا گیا ہے ، اور ٹیکومیٹر نے متناسب طور پر آئی سی 2 کے پن نمبر 5 پر موجود صلاحیت کو کم کردیا ہے جس کے نتیجے میں موٹر پر ایس پی ڈبلیو ایم کے تناسب کو متناسب طور پر کم کیا جاتا ہے ، اور اس کے نتیجے میں موٹر کے لئے وولٹیج کم ہوجاتا ہے ، درست رفتار کے ساتھ موٹر سپیڈ تغیر کو یقینی بناتا ہے۔ مطلوبہ V / F تناسب
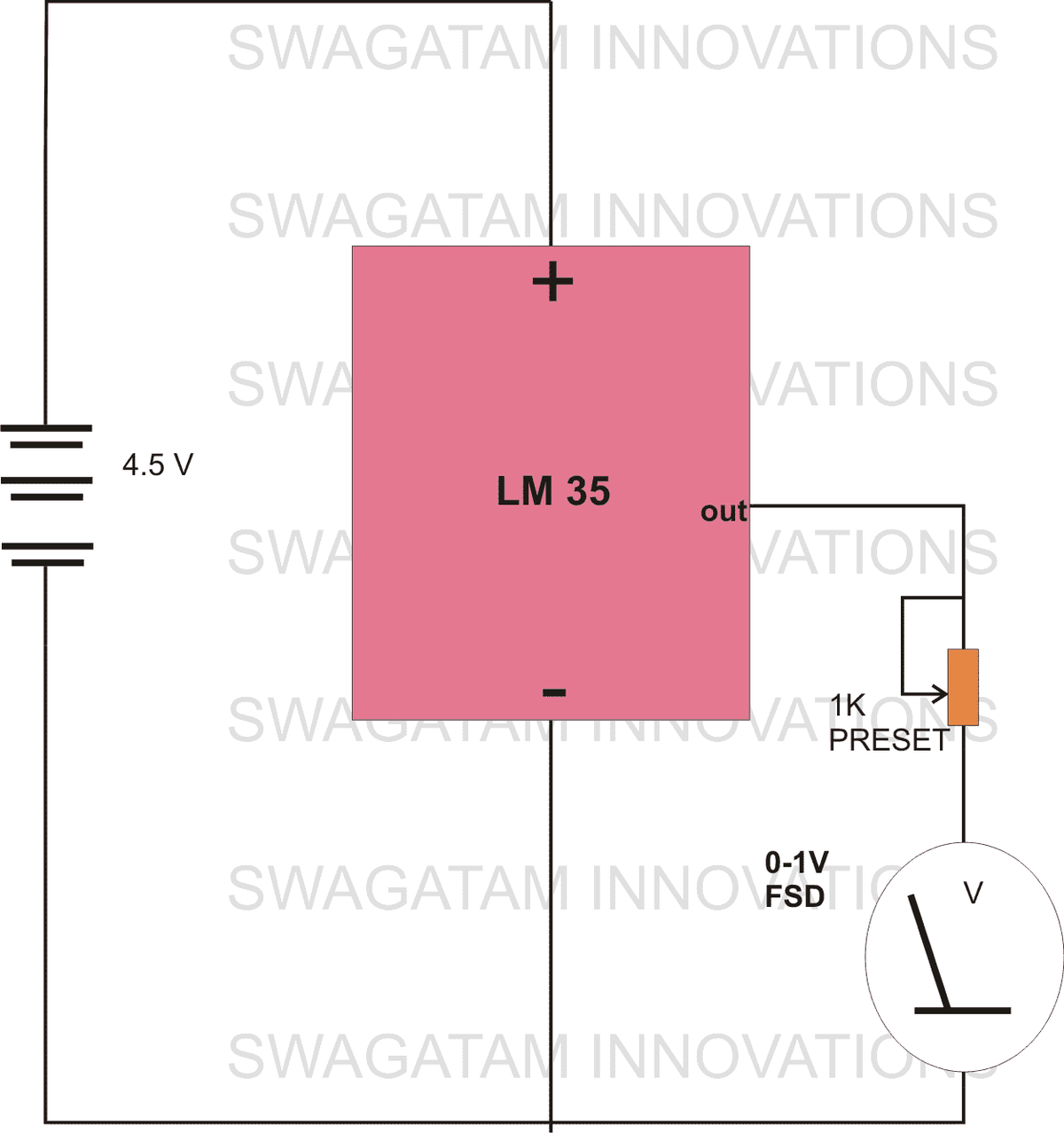
ایک گھریلو V سے F کنورٹر

مندرجہ بالا وولٹیج ٹو فریکوینسی کنورٹر سرکٹ میں ایک آئی سی 4060 استعمال کیا جاتا ہے اور اس کی تعدد پر منحصر مزاحمت ایل ای ڈی / ایل ڈی آر اسمبلی کے ذریعے مطلوبہ تبادلوں کے لئے متاثر ہوتی ہے۔
ایل ای ڈی / ایل ڈی آر اسمبلی لائٹ پروف باکس کے اندر بند کردی گئی ہے ، اور ایل ڈی آر آایسی کے 1M فریکوئنسی پر منحصر مزاحم کے اس پار لگا ہوا ہے۔
چونکہ LDR / LDR کا ردعمل کافی حد تک ہے ، لہذا LDR پر ایل ای ڈی کی مختلف روشنی مختلف ہوتی ہے۔
اسٹیج کی FSD یا V / Hz رینج مناسب طریقے سے 1M ریسٹر یا یہاں تک کہ C1 ویلیو سیٹ کرکے مقرر کی جاسکتی ہے۔
ایل ای ڈی ہے وولٹیج پہلے PWM سرکٹ مرحلے سے PWMs کے ذریعے اخذ اور روشن کیا جاتا ہے۔ اس سے یہ ظاہر ہوتا ہے کہ جیسے ہی پی ڈبلیو ایم مختلف ہوتے ہیں ، ایل ای ڈی روشنی بھی مختلف ہوتی ہے جس کے نتیجے میں مذکورہ آریھ میں آئی سی 4060 کے پن 3 پر متناسب طور پر بڑھتی ہوئی یا کم ہوتی تعدد کو جنم ملے گا۔
کنورٹر کو VFD کے ساتھ ضم کرنا
آئی سی 4060 سے اس مختلف تعدد کو اب صرف 3 مرحلہ جنریٹر IC CD4035 گھڑی کے ان پٹ کے ساتھ مربوط کرنے کی ضرورت ہے۔
مذکورہ بالا مراحل 3 فیز وی ایف ڈی سرکٹ بنانے کے لئے اہم اجزاء تشکیل دیتا ہے۔
اب ، یہ ضروری ہوگا کہ IGBT موٹر کنٹرولرز کی فراہمی اور پورے ڈیزائن کے ل for طریقہ کار ترتیب دینے کے لئے ضروری DC BUS کے بارے میں بات کی جائے۔
IGBT H-Bridge ریلوں کے پار لگائے گئے DC BUS مندرجہ ذیل سرکٹ کنفیگریشن کا استعمال کرکے دستیاب 3 مرحلے والے ان پٹ کی اصلاح کرکے حاصل کیا جاسکتا ہے۔ IGBT DC BUS ریلیں 'بوجھ' کے طور پر اشارے کئے گئے پوائنٹس کے پار جڑی ہوئی ہیں

کسی ایک مرحلے کے ذریعہ اصلاح 4 معیاری 4 ڈایڈڈ برج نیٹ ورک کی تشکیل کا استعمال کرتے ہوئے نافذ کی جاسکتی ہے۔
مجوزہ 3 فیز وی ایف ڈی سرکٹ کیسے مرتب کریں
یہ مندرجہ ذیل ہدایات کے مطابق کیا جاسکتا ہے:
آئی جی بی ٹی کے اس پار ڈی سی بس وولٹیج لگانے کے بعد (بغیر موٹر منسلک) PWM 1k پیش سیٹ ایڈجسٹ کریں جب تک کہ ریلوں کے پار وولٹیج مطلوبہ موٹر وولٹیج کے چشمی کے برابر نہ ہوجائے۔
اگلی آئی سی 4060 1M پیش سیٹ ایڈجسٹ کریں تاکہ کسی بھی آئی سی آر آر 2330 آدانوں کو مطلوبہ درست تعدد کی سطح پر ایڈجسٹ کیا جاسکے۔
مذکورہ بالا طریقہ کار مکمل ہونے کے بعد ، مخصوص موٹر منسلک ہوسکتی ہے اور مختلف وولٹیج کی سطح ، V / Hz پیرامیٹر کے ساتھ فراہم کی جاسکتی ہے اور منسلک موٹر پر خود کار طریقے سے V / ہرٹز آپریشن کے لئے تصدیق شدہ ہے۔
پچھلا: گرو لائٹ سرکٹ کیسے بنائیں؟ اگلا: واٹر سوفنر سرکٹ کی کھوج کی