پوسٹ میں برش لیس ڈی سی موٹرز کے بنیادی آپریٹنگ تصور کو جامع طور پر تفصیل سے بتایا گیا ہے جسے بی ایل ڈی سی موٹر بھی کہا جاتا ہے۔
برش اور برش لیس ڈی سی موٹرز کے مابین فرق
ہمارے روایتی صاف موٹروں میں برش لگے ہوئے ہیں تاکہ آس پاس کے اسٹیشنری مستقل مقناطیس اسٹیٹر کے سلسلے میں مرکزی متحرک روٹر کو تبدیل کیا جاسکے۔
برش لازمی ہوجاتے ہیں کیونکہ روٹر الیکٹرو میگنیٹ کے استعمال سے بنایا گیا ہے جس کو چلانے کے لئے طاقت کی ضرورت ہے لیکن چونکہ اسے گھومانے کی ضرورت ہے چیزیں اناڑی بن جاتی ہیں اور برش گھومنے والے برقی مقناطیسی روٹر کو بجلی کی فراہمی کا واحد متبادل بن جاتے ہیں۔
برش لیس ڈی سی موٹرز یا بی ایل ڈی سی موٹرز کے برعکس ہمارے پاس اسٹیشنری مرکزی اسٹیٹر اور آس پاس کا سرکلر روٹر ہے۔ اسٹیٹر الیکٹرو میگنیٹ کے ایک سیٹ سے بنا ہوتا ہے جبکہ روٹر کے پاس ایک خاص کیلکولیشن پوزیشنوں پر مستقل میگنےٹ اپنی فریم میں چسپاں ہوتے ہیں۔
ہال اثر سینسر کا استعمال کرتے ہوئے
میکانزم میں ہال اثر سینسر بھی ہے جو اسٹیٹر الیکٹرو مقناطیس کے حوالے سے روٹر اور اس کے میگنےٹ کی حیثیت کو سمجھنے اور اعداد و شمار کو بیرونی سوئچنگ سرکٹ کو مطلع کرنے کے لئے نصب کیا گیا ہے جو پھر برقی مقناطیس کو چالو کرنے / غیر فعال کرنے کا ذمہ دار بن جاتا ہے۔ درست ترتیب یا وقت ، روٹر پر گھماؤ حرکت کو متاثر کرنا۔
مذکورہ بالا وضاحت کو مندرجہ ذیل بنیادی مثال کی مدد سے اور اس کے بعد کی تصاویر میں ایک وسیع و عریض ڈیزائن کے ذریعے سمجھا جاسکتا ہے۔

ہم نے میگنےٹ اور ان ڈیوائسز کے تعامل کے بارے میں کچھ دلچسپ باتیں سیکھیں اور جان لیں۔
ہم جانتے ہیں کہ مقناطیس کا شمالی قطب ایک اور مقناطیس کے جنوب قطب کو اپنی طرف راغب کرتا ہے جبکہ ڈنڈے کی طرح کانپ جاتے ہیں۔
مستقل میگنےٹ کیسے تعینات ہیں
مذکورہ آریگرام میں ہم ایک کنارے پر سرایت شدہ مقناطیس کے ساتھ ایک ڈسک دیکھتے ہیں (جس کا رنگ سرخ رنگ میں دکھایا گیا ہے) جو شمال قطب کے ساتھ بیرونی کا سامنا کرنا پڑتا ہے ، اور ایک برقی مقناطیس بھی جس میں ڈسک کے سرکلر ایج کے متوازی قربت پر رکھی جاتی ہے جس کی وجہ سے ایک پیدا ہوتا ہے جب جنوب میں مقناطیسی فیلڈ
اب یہ فرض کرتے ہوئے کہ یہ انتظام پوزیشن میں ہے جیسا کہ اوپری آریگرام میں ایک غیر فعال حالت میں برقی مقناطیس کے ساتھ دکھایا گیا ہے۔
اس پوزیشن میں جیسے ہی برقی مقناطیس ایک مناسب ڈی سی ان پٹ کے ساتھ چالو ہوجاتا ہے یہ حاصل کرتا ہے اور ایک جنوب مقناطیسی میدان پیدا کرتا ہے جس سے ڈسک مقناطیس پر ایک کھینچنے والی قوت کو متاثر کیا جاتا ہے جس کے نتیجے میں ڈسک کو کچھ ٹورک کے ساتھ گھومنے پر مجبور کرتا ہے جب تک کہ اس کے مستقل مقناطیس کے ساتھ لائن میں نہیں آتا ہے۔ بہاؤ کے برعکس لائنوں برقی.
مذکورہ بالا کارروائی بنیادی شکل کو ظاہر کرتی ہے جس میں بی ایل ڈی سی تصور کام کرتا ہے۔
بی ایل ڈی سی موٹر ہال اثر سینسر کے ساتھ کیسے کام کرتی ہے
اب دیکھتے ہیں کہ روٹر پر ایک مستقل حرکت کو برقرار رکھنے کے لئے ہال اثر سینسروں کا استعمال کرتے ہوئے اصل میں مذکورہ بالا تصور کو کس طرح نافذ کیا گیا ہے۔
مندرجہ ذیل مثال آریھ میکانزم کی مکمل وضاحت کرتی ہے۔

مندرجہ بالا آریھ میں ہم بنیادی طور پر سیدھے سیدھے بی ایل ڈی سی روٹر / اسٹیٹر کا انتظام دیکھتے ہیں ، جہاں بیرونی سرکلر عنصر گھومنے والا روٹر ہوتا ہے جبکہ مرکزی برقی مقناطیسی مقررہ اسٹیٹر بن جاتا ہے۔
روٹر کو دائرہ میں ایک مستقل میگنےٹ کی دو جوڑی رکھی ہوئی دیکھی جاسکتی ہے جس میں فلوکس کی متاثر کن لائنوں کی حیثیت سے جنوبی قطب ہوتا ہے ، مرکزی اسٹیٹر ایک مضبوط برقی مقناطیس ہے جو شمالی قطب مقناطیسی بہاؤ کی مساوی طاقت پیدا کرنے کے لئے ڈیزائن کیا گیا ہے جب کسی کے ساتھ تقویت بخش ہوتا ہے۔ بیرونی ڈی سی۔
ہم اندرونی روٹر کے دائرہ کے ایک کونے میں واقع ایک ہال سینسر کا تصور بھی دیکھ سکتے ہیں۔ ہال کا اثر بنیادی طور پر گھومنے والے روٹر کے مقناطیسی فیلڈ کو سمجھتا ہے اور اسٹیٹر الیکٹرو میگنیٹس کو طاقت دینے کے ذمہ دار کنٹرول سرکٹ کو سگنل دیتا ہے۔
بالائی پوزیشن کا حوالہ دیتے ہوئے ہم ہال سینسر کے ساتھ قریبی رابطے میں روٹر کا خالی علاقہ (جو کسی بھی مقناطیسی میدان سے باطل ہیں) دیکھتے ہیں اور اسے بند آف حالت میں رکھتے ہیں۔
اس فوری طور پر ، ہال اثر سے سوئچ آف سگنل الیکٹرو میگنیٹس کو سوئچ کرنے کے لئے کنٹرول سرکٹ کو مطلع کرتا ہے ، جو فوری طور پر صرف کونے کے چاروں طرف کھڑے روٹر جنوبی قطب پر کھینچنے والا اثر دلاتا ہے۔
جب ایسا ہوتا ہے تو جنوبی قطب روٹر پر مطلوبہ ٹارک تیار کرتے ہوئے نیچے آتا ہے اور خود کو برقی مقناطیس کے شمالی قطب کے مطابق صف میں ڈھالنے کی کوشش کرتا ہے۔
تاہم اس عمل میں روٹر کا جنوبی قطب بھی اپنے آپ کو ہال سینسر کے قریب کھینچتا ہے (جیسا کہ نچلے آریگرام میں دکھایا گیا ہے) جو فوری طور پر اس کا پتہ لگاتا ہے اور برقی مقناطیوں کو بند کرنے کے لئے کنٹرول سرکٹ کو مطلع کرنے پر سوئچ کرتا ہے۔
الیکٹرو میگنیٹس کا بند وقت اہم ہے
جیسا کہ ہال اثر سینسر نے اشارہ کیا ہے صحیح وقت پر برقناطیسیوں کا رخ بند کرنا روٹر موشن کی روک تھام اور رکاوٹ کو روکتا ہے ، بلکہ جب تک کہ پچھلی پوزیشن کی تشکیل شروع نہ ہو اس وقت تک پیدا شدہ ٹارک کے ذریعے تحریک کے ساتھ چلنے کی اجازت دیتا ہے۔ سینسر نے پھر سے روٹر کا خالی جگہ 'محسوس' کیا اور سائیکل کو دہرانے سے بند ہوجاتا ہے۔
مختلف روٹر پوزیشنوں کے مطابق ہال سینسر کی مذکورہ بالا ٹوگلنگ ایک ٹوک کے ساتھ مستقل گھومنے والی حرکت کو متاثر کرتی ہے جو اسٹیٹر / روٹر مقناطیسی تعامل کے لئے براہ راست متناسب ہوسکتی ہے ، اور ہال اثر پوزیشننگ کا یقینا ہے۔
مندرجہ بالا بات چیت سب سے بنیادی دو مقناطیس ، ایک ہال سینسر میکانزم کی وضاحت کرتی ہے۔
غیر معمولی طور پر اعلی ٹارکس کے حصول کے ل more برقی مقناطیس کے مزید میگنےٹ اور سیٹ دیگر اعلی کارکردگی میں برشلیس موٹرز میں لگائے جاتے ہیں جس میں روٹر میگنےٹ کے متعدد سینسنگ کو لاگو کرنے کے لئے ایک سے زیادہ ہال اثر سینسر دیکھے جاسکتے ہیں تاکہ برقی مقناطیس کے مختلف سیٹ تبدیل ہوسکیں۔ ترجیحی درست ترتیب
بی ایل ڈی سی موٹر کو کیسے کنٹرول کیا جائے
اب تک ہم کے بنیادی کام کرنے کا تصور سمجھ چکے ہیں بی ایل ڈی سی موٹرز اور یہ سیکھا کہ روٹر کی مسلسل گھومنے والی حرکت کو برقرار رکھنے کے ل for بیرونی منسلک الیکٹرانک سرکٹ کے ذریعہ موٹر کے برقی مقناطیس کو چالو کرنے کے لئے ہال سینسر کا استعمال کس طرح ہوتا ہے ، اگلے حصے میں ہم اس بات کا باقاعدگی سے مطالعہ کریں گے کہ بی ایل ڈی سی ڈرائیور سرکٹ بی ایل ڈی سی موٹرز کو کنٹرول کرنے کے لئے درحقیقت کیسے کام کرتا ہے۔
ایک مستحکم اسٹیٹر الیکٹرو میگنیٹ اور گھومنے والے آزاد مقناطیسی روٹر کے نفاذ کا طریقہ کار روایتی برش شدہ موٹروں کے مقابلہ میں بی ایل ڈی سی موٹرز کی بہتر کارکردگی کو یقینی بناتا ہے جس کے بالکل برعکس ٹوپولوجی ہوتی ہے اور اسی وجہ سے موٹر آپریشنوں کے لئے برش کی ضرورت ہوتی ہے۔ برش کا استعمال لمبی عمر ، کھپت اور سائز کے لحاظ سے طریقہ کار کو نسبتا ine غیر موثر بنا دیتا ہے۔
بی ایل ڈی سی موٹر کا نقصان
اگرچہ ، بی ایل ڈی سی اقسام موثر ترین موٹر تصور ہوسکتے ہیں ، لیکن اس میں ایک اہم نقص ہے کہ اسے چلانے کے لئے بیرونی الیکٹرانک سرکٹ کی ضرورت ہے۔ تاہم ، جدید آئی سی اور حساس ہال سینسروں کی آمد کے ساتھ جب اس تصور کے ساتھ اعلی کارکردگی کی اعلی کارکردگی کے ساتھ مقابلے میں یہ مسئلہ کافی معمولی معلوم ہوتا ہے۔
4 مقناطیس بی ایل ڈی سی ڈرائیور ڈیزائن
موجودہ مضمون میں ہم چار مقناطیس ، سنگل ہال سینسر ٹائپ بی ایل ڈی سی موٹر کے لئے ایک سادہ اور بنیادی کنٹرول سرکٹ پر تبادلہ خیال کر رہے ہیں۔ موٹر آپریشن کو مندرجہ ذیل موٹر میکانزم ڈایاگرام کا حوالہ دے کر سمجھا جاسکتا ہے:

مذکورہ شبیہہ ایک بنیادی بی ایل ڈی سی موٹر انتظامات کو ظاہر کرتی ہے جس میں ایک بیرونی روٹر کے دائرہ میں مستقل میگنےٹ کے دو سیٹ ہوتے ہیں اور اسٹیٹر کی حیثیت سے مرکزی الیکٹرو مقناطیس (اے ، بی ، سی ، ڈی) کے دو سیٹ ہوتے ہیں۔
گھومنے والی ٹارک کو شروع اور برقرار رکھنے کے ل In ، A ، B یا C ، D الیکٹرو میگنیٹ کو متحرک حالت میں ہونا چاہئے (کبھی بھی ساتھ نہیں) متحرک برقی مقناطیس کے سلسلے میں روٹر مقناطیس کے شمالی / جنوب قطب کی پوزیشنوں پر منحصر ہوتا ہے۔
بی ایل ڈی سی موٹر ڈرائیور کیسے کام کرتا ہے
عین مطابق سمجھنے کے ل let's ، آئیے اوپر والے منظرنامے میں A اور B کے ساتھ ایک سوئچ شدہ حالت میں دکھائے جانے والے مقام کو فرض کریں کہ اس طرف A قطب جنوبی کے ساتھ متحرک ہے جبکہ سمت B قطب شمالی کے ساتھ متحرک ہے۔
اس کا مطلب یہ ہوگا کہ پہلو A اس کے بائیں نیلے شمالی قطب پر ایک کھینچنے والا اثر ڈال رہا ہے اور اسٹیٹر کے دائیں جانب کے جنوب قطب پر ایک دفع اثر ڈالتا ہے ، اسی طرح پہلو B نیچے کا سرخ سرخ قطب کھینچ کر اوپر والے شمال کو پیچھے ہٹاتا ہے۔ روٹر کا قطب .... اس سارے عمل کو پھر یہ سمجھا جاسکتا ہے کہ روٹر میکانزم پر گھڑی کی ایک متاثر کن حرکت انجام دے رہا ہے۔
آئیے یہ بھی فرض کریں کہ مذکورہ صورتحال میں ہال سینسر غیر فعال حالت میں ہے کیونکہ یہ 'جنوبی قطب متحرک' ہال سینسر آلہ ہوسکتا ہے۔
مندرجہ بالا اثر روٹر کو سیدھ میں کرنے اور اس پر مجبور کرنے کی کوشش کرے گا کہ جنوب B کے ساتھ آمنے سامنے جالے جبکہ شمال قطب کی طرف A کے ساتھ ، تاہم اس سے پہلے کہ اس صورتحال سے ہال کا سینسر منتقل ہوجائے ، قریبی قربت میں لایا جائے روٹر کے اوپری جنوبی قطب کو منتقل کرنا ، اور جب یہ صرف ہال سینسر کے پار ہوتا ہے تو ، اسے منسلک کنٹرول سرکٹ میں مثبت سگنل بھیجنے پر مجبور ہوجاتا ہے جو فوری طور پر جواب دیتا ہے اور برقی مقناطیس A / B کو بند کرتا ہے ، اور الیکٹرو میگنیٹس C / پر سوئچ کرتا ہے۔ ڈی ، اس بات کو یقینی بناتے ہوئے کہ روٹر کے گھڑی کی سمت لمحے پر پھر سے روٹر پر مستقل گھومنے والی ٹورک کو برقرار رکھنے کا نفاذ کیا گیا ہے۔
بنیادی بی ایل ڈی سی ڈرائیور سرکٹ
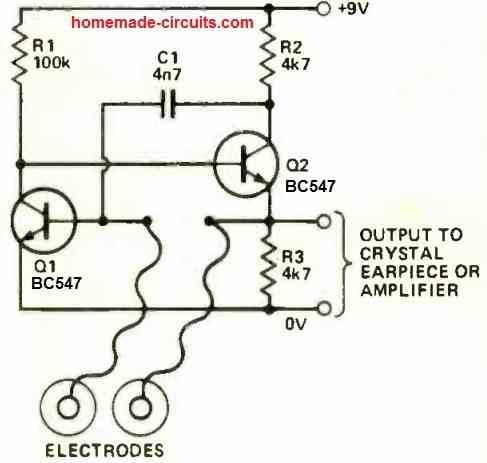
ہال سینسر ٹرگرنگ سگنل کے جواب میں برقی مقناطیس کی اوپر سوئچنگ کو مندرجہ ذیل سیدھے سیدھے سیدھے سیدھے سیدھے BLDC کنٹرول سرکٹ آئیڈی کا استعمال کرتے ہوئے نافذ کیا جاسکتا ہے۔

ہال سینسر ، BC547 اور TIP122 کے جوڑے ہوئے سوئچ کے دوران ، سرکٹ کو اس کی بہت زیادہ وضاحت کی ضرورت نہیں ہے ، اور اسی طرح تبدیل ہوجاتا ہے جس کے نتیجے میں وہ اپنے کلیکٹر میں مثبت اور برقی مقناطیس کے اسی سیٹ کو موڑ دیتا ہے۔ ، ہال سینسر کے سوئچ آف ادوار کے دوران ، BC547 / TIP122 جوڑی بند ہے ، لیکن انتہائی بائیں TIP122 ٹرانجسٹر کو برقی مقناطیس کے مخالف سیٹوں کو چالو کرنے پر تبدیل کیا جاتا ہے۔
صورت حال باری باری ٹوگل رہتی ہے ، جب تک کہ بجلی کا استعمال باقی رہتا ہے جب تک کہ بی ایل ڈی سی کو مطلوبہ ٹورکس اور رفتار کے ساتھ گھومتا رہتا ہے۔
پچھلا: 12V بیٹری سے لیپ ٹاپ چارجر سرکٹ اگلا: ایک طاقتور آریف سگنل جیمر سرکٹ کس طرح بنانا ہے