یہاں پیش کیا گیا مضمون ایک بہت ہی آسان بند لوپ AC موٹر اسپیڈ کنٹرولر سرکٹ کی وضاحت کرتا ہے جو سنگل فیز AC موٹر اسپیڈ کو کنٹرول کرنے کے لئے استعمال کیا جاسکتا ہے۔
سرکٹ بہت سستا ہے اور مطلوبہ عملدرآمد کے ل ordinary عام الیکٹرانک اجزاء کا استعمال کرتا ہے۔ سرکٹ کی اہم خصوصیت یہ ہے کہ یہ بند لوپ کی قسم ہے ، اس کا مطلب یہ ہے کہ موٹر کی رفتار یا ٹارک اس سرکٹ میں بوجھ یا موٹر کی رفتار سے کبھی متاثر نہیں ہوسکتا ، اس کے برعکس ٹارک بالواسطہ متناسب ہے رفتار کی شدت.
سرکٹ آپریشن:
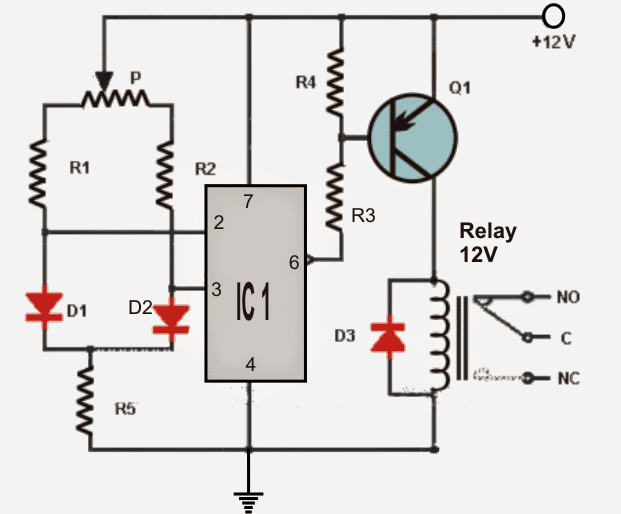
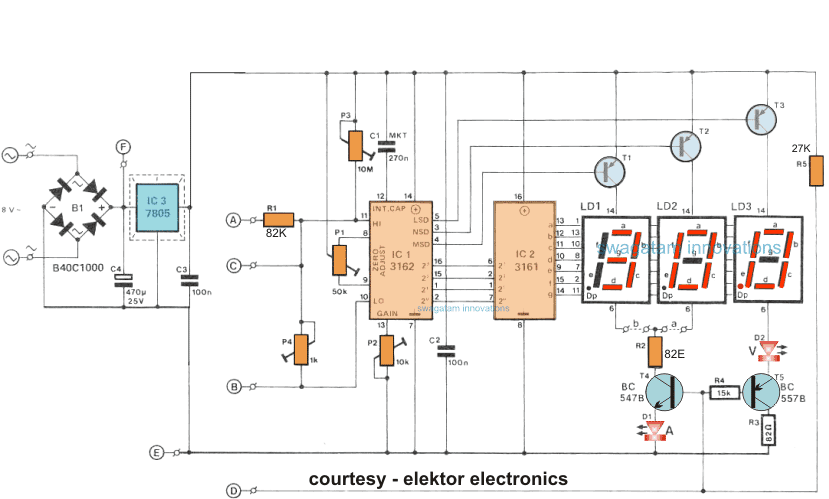
مجوزہ سنگل فیز بند لوپ AC موٹر کنٹرولر کے سرکٹ ڈایاگرام کا حوالہ دیتے ہوئے ، اس میں شامل کاروائیوں کو مندرجہ ذیل نکات کے ذریعے سمجھا جاسکتا ہے:
ان پٹ اے سی کے مثبت آدھے چکروں کے لac ، ریالیٹر R1 اور ڈایڈ ڈی 1 کے ذریعہ کاپاکیٹر سی 2 وصول کیا جاتا ہے۔

C2 کا معاوضہ اس وقت تک برقرار رہتا ہے جب تک کہ اس سندارتر کے پار وولٹیج ترتیب کے نقلی زنر وولٹیج کے مترادف ہوجائے۔
ٹرانجسٹر T1 کے گرد طے شدہ سرکٹ زینر ڈایڈڈ کے عمل کو موثر انداز میں پیش کرتا ہے۔
برتن P1 کی شمولیت سے اس 'زینر ڈایڈڈ' کی وولٹیج کو ایڈجسٹ کرنا ممکن ہوتا ہے۔ واضح طور پر ، T1 کے پار تیار کردہ وولٹیج کا مقابلہ مزاحم R3 اور R2 + P1 کے درمیان تناسب سے ہوتا ہے۔
مزاحم R4 کے پار وولٹیج کو ہمیشہ 0.6 وولٹ کے برابر رکھا جاتا ہے جو T1 کے بیس امیٹر وولٹیج کے مطلوبہ انعقاد وولٹیج کے برابر ہے۔
لہذا اس کا مطلب یہ ہے کہ مذکورہ بالا وضاحت کی گئی زینر وولٹیج اس قدر کے برابر ہونی چاہئے جو اظہار کو حل کرکے حاصل کی جاسکتی ہے۔
(P1 + R2 + R3 / R3) .6 0.6
مذکورہ بالا بند لوپ اے سی موٹر اسپیڈ کنٹرولر سرکٹ کے حصے کی فہرست
- R1 = 39K ،
- R2 = 12K ،
- R3 = 22K ،
- R4 = 68K ،
- P1 = 220K ،
- تمام ڈایڈڈز = 1N4007 ،
- C1 = 0.1 / 400V،
- C2 = 100uF / 35V،
- T1 = BC547B ،
- ایس سی آر = سی 106
- ایل 1 = 30 موڑ 3 25 ملی میٹر فیریٹ چھڑی یا 40 یو ایچ / 5 واٹ پر 25 ایس ڈبلیو جی تار کے
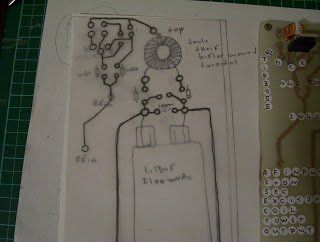
ایک خاص وجہ کے لئے بوجھ کس طرح پوزیشن میں ہے
ایک محتاط تفتیش سے یہ پتہ چلتا ہے کہ موٹر یا بوجھ معمول کی جگہ پر متعارف نہیں کرایا گیا تھا بلکہ یہ ایس سی آر کے بعد ہی اس کے کیتھوڈ پر وائرڈ ہوا ہے۔
اس سرکٹ کے ساتھ ایک دلچسپ خصوصیت متعارف کرانے کا سبب بنتا ہے۔
سرکٹ میں موٹر کی مذکورہ بالا خاص پوزیشن ایس سی آر کی فائرنگ کا وقت موٹر کے بیک ای ایم ایف اور سرکٹ کے ”زینر وولٹیج“ کے درمیان ممکنہ فرق پر انحصار کرتی ہے۔
اس کا سیدھا مطلب ہے کہ جتنا زیادہ موٹر لادا جاتا ہے ، ایس سی آر کی تیزی سے آگ لگ جاتی ہے۔
یہ طریقہ کار ایک بند لوپ کی قسم کے کام کا تقاضا کرتا ہے جہاں موٹیک نے خود بیک بیک EMF کی شکل میں آراء وصول کیں۔
تاہم سرکٹ معمولی خرابی کے ساتھ وابستہ ہے۔ ایس سی آر کو اپنانے کا مطلب ہے کہ سرکٹ صرف 180 ڈگری فیز کنٹرول کو سنبھال سکتا ہے اور پوری رفتار کی حد میں موٹر کو کنٹرول نہیں کیا جاسکتا ہے لیکن اس میں سے صرف 50 فیصد تک۔
سرکٹ کی سستی نوعیت کی وجہ سے ایک اور نقصان یہ بھی ہے کہ موٹر کم رفتار سے ہچکی پیدا کرتی ہے ، تاہم اس کی رفتار میں اضافہ ہونے کے بعد یہ مسئلہ مکمل طور پر ختم ہوجاتا ہے۔
L1 اور C1 کا فنکشن
ایل 1 اور سی 1 ایس سی آر کے ذریعہ تیز رفتار مرحلے کے کاٹنے کی وجہ سے پیدا ہونے والی اعلی تعدد آر ایف کو جانچنے کے لئے شامل ہیں۔
کہیں نہیں کہنا چاہئے کہ زیادہ سے زیادہ نتائج کے ل the ڈیوائس (ایس سی آر) کو مناسب ہیٹ سنک پر لگایا جانا چاہئے۔
بیک EMF ڈرل اسپیڈ کنٹرولر سرکٹ
یہ سرکٹ بنیادی طور پر چھوٹی سی سیریز کے زخم موٹروں کی مستحکم رفتار کو کنٹرول کرنے کے لئے استعمال کیا جاتا ہے ، جیسا کہ متعدد برقی ہینڈ ڈرل وغیرہ میں پایا جاتا ہے ، ٹورک اور اس کی رفتار P1 پوٹینومیٹر کے ذریعہ کنٹرول ہوتی ہے۔ یہ پوٹینومیٹر کنفیگریشن بتاتی ہے کہ کتنی لمحے فراغ کو متحرک کیا جاسکتا ہے۔

جب موٹر کی رفتار پیش سیٹ ویلیو (لوڈ منسلک کے ساتھ) کے نیچے آتی ہے ، تو موٹر کی بیک ای ایم ایف کم ہوجاتی ہے۔ نتیجہ کے طور پر ، R1 ، P1 ، اور C5 کے گرد وولٹیج بڑھتا ہے تاکہ Triac پہلے سے چالو ہوجائے اور موٹر کی رفتار بڑھ جاتی ہے۔ رفتار استحکام کا ایک خاص تناسب اسی طرح حاصل کیا جاتا ہے۔
پچھلا: سمندری پانی سے بجلی پیدا کرنے کا طریقہ۔ 2 آسان طریقے اگلا: جی ایس ایم پر مبنی سیل فون ریموٹ کنٹرول سوئچ سرکٹ