
تعریف
برش لیس ڈی سی موٹر ایک مستقل مقناطیس اور اسٹیٹر کی شکل میں روٹر پر مشتمل ہوتی ہے جس میں پولی فیز آرمرچر وینڈنگ کی شکل میں ہوتا ہے۔ یہ روایتی ڈی سی موٹر سے اس طرح مختلف ہے کہ اس میں برش نہیں ہوتے ہیں اور اسٹیٹور ونڈنگ کو کھانا کھلانے کے لئے الیکٹرانک ڈرائیو کا استعمال کرتے ہوئے یہ سفر بجلی سے کیا جاتا ہے۔
بنیادی طور پر ایک بی ایل ڈی سی موٹر دو طریقوں سے تعمیر کی جاسکتی ہے- کور کے باہر روٹر رکھ کر اور کور میں سمیٹ ہواؤنڈ اور کور کے باہر سمت رکھ کے دوسرے۔ سابقہ انتظام میں ، روٹر میگنےٹ موصلیت کا کام کرتے ہیں اور موٹر سے گرمی کی کھپت کی شرح کو کم کرتے ہیں اور کم کرنٹ پر کام کرتے ہیں۔ یہ عام طور پر شائقین میں استعمال ہوتا ہے۔ مؤخر الذکر انتظامات میں ، موٹر زیادہ گرمی ختم کردیتا ہے ، اس طرح اس کے ٹورک میں اضافہ ہوتا ہے۔ یہ ہارڈ ڈسک ڈرائیو میں استعمال ہوتا ہے۔

بی ایل ڈی سی
4 پول 2 فیز موٹر آپریشن
برش لیس ڈی سی موٹر کو الیکٹرانک ڈرائیو کے ذریعہ کارفرما کیا جاتا ہے جو روٹر موڑتے ہی اسٹیٹر ونڈینگ کے درمیان سپلائی وولٹیج کو تبدیل کرتا ہے۔ روٹر پوزیشن کی نگرانی ٹرانس ڈوزر (آپٹیکل یا مقناطیسی) کے ذریعہ کی جاتی ہے جو الیکٹرانک کنٹرولر کو معلومات فراہم کرتی ہے اور اس پوزیشن کی بنیاد پر ، استحکام پانے والی اسٹیٹر کی سمت کا تعین کیا جاتا ہے۔ یہ الیکٹرانک ڈرائیو ٹرانجسٹروں پر مشتمل ہے (ہر مرحلے کے لئے 2) جو مائکرو پروسیسر کے ذریعے چلتی ہے۔

بی ایل ڈی سی-ڈی سی
مستقل میگنےٹ کے ذریعہ تیار کردہ مقناطیسی فیلڈ اسٹیٹر ونڈنگز میں موجودہ کے ذریعہ فیلڈ کے ساتھ تعامل کرتا ہے ، جس سے میکانکی ٹارک پیدا ہوتا ہے۔ الیکٹرانک سوئچنگ سرکٹ یا ڈرائیو اسٹیٹر پر سپلائی موجودہ کو بدل دیتا ہے تاکہ بات چیت کرنے والے فیلڈز کے درمیان 0 سے 90 ڈگری کا مستقل زاویہ برقرار رہ سکے۔ ہال سینسر زیادہ تر اسٹیٹر پر یا روٹر پر لگائے جاتے ہیں۔ جب روٹر شمالی یا جنوبی قطب پر مبنی ہال سینسر سے گذرتا ہے تو ، یہ ایک زیادہ یا کم سگنل پیدا کرتا ہے۔ ان اشاروں کے امتزاج کی بنیاد پر ، سمت پذیر ہونے کی سمت تعریف کی گئی ہے۔ موٹر کو چلانے کے ل، ، وینڈنگز کے ذریعہ تیار کردہ مقناطیسی فیلڈ کی پوزیشن میں تبدیلی ہونی چاہئے ، کیونکہ روٹر اسٹیٹر فیلڈ کو پکڑنے کے لئے حرکت کرتا ہے۔

سرکٹ
4 قطب ، 2 فیز برش لیس ڈی سی موٹر میں ، ایک ہی ہال سینسر استعمال کیا جاتا ہے ، جو اسٹیٹر پر سرایت کرتا ہے۔ جیسے ہی روٹر گھومتا ہے ، ہال سینسر مقناطیسی (شمالی یا جنوب) کے قطب پر منحصر ہوتا ہے ، اس کی حیثیت کو محسوس کرتا ہے اور ایک اعلی یا کم سگنل تیار کرتا ہے۔ ہال سینسر ایک رزسٹر کے ذریعے ٹرانجسٹروں سے منسلک ہوتا ہے۔ جب سینسر کی پیداوار میں ہائی وولٹیج کا اشارہ ہوتا ہے تو ، کنڈلی اے سے جڑا ہوا ٹرانجسٹر چلنا شروع کرتا ہے ، جس سے موجودہ کی روانی کا راستہ مل جاتا ہے اور اس طرح کوائل اے کو تقویت مل جاتی ہے۔ سندارتار سپلائی کی مکمل وولٹیج پر چارج کرنا شروع کردیتا ہے۔ جب ہال سینسر روٹر کی قطبی حیثیت میں تبدیلی کا پتہ لگاتا ہے تو ، اس کی پیداوار میں کم وولٹیج سگنل تیار ہوتا ہے اور چونکہ ٹرانجسٹر 1 کو کوئی فراہمی نہیں ملتی ہے ، لہذا یہ کٹ آف حالت میں ہے۔ کیپسیٹر کے ارد گرد تیار کردہ وولٹیج وی سی سی ہے ، جو 2 کو سپلائی وولٹیج ہےاین ڈیٹرانجسٹر ، اور کنڈلی بی کو اب تقویت ملی ہے ، جیسا کہ موجودہ اس میں سے گزرتا ہے۔
بی ایل ڈی سی موٹرز نے مستقل میگنےٹ رکھے ہیں ، جو گھومتے ہیں اور ایک مقررہ آرمچر ہوتے ہیں ، جس سے حرکت پزیر چال سے موجودہ کو جوڑنے کے مسائل ختم ہوجاتے ہیں۔ اور ممکن ہے اسٹیٹر یا ہچکچاہٹ والی موٹرز سے زیادہ روٹر پر زیادہ سے زیادہ ڈنڈے۔ مؤخر الذکر مستقل میگنےٹ کے بغیر ہو سکتا ہے ، صرف کھمبے جو روٹر پر راغب ہوتے ہیں پھر اسٹیٹر ونڈنگ کے ذریعہ وقتا فوقتا انتظام میں کھینچ جاتے ہیں۔ ایک برقی کنٹرولر برش / کموٹیٹر اسمبلی کو برش شدہ ڈی سی موٹر کی جگہ لے لیتا ہے ، جو موٹر کو موڑ رکھنے کے ل to فیز کو سمیٹ سے بدلتا رہتا ہے۔ کنٹرولر برش / کمیوٹر نظام کے بجائے ٹھوس ریاست سرکٹ کا استعمال کرکے تقابلی وقتی بجلی تقسیم کرتا ہے۔

بی ایل ڈی سی موٹر
برش لیس ڈی سی موٹرز کے 7 فوائد
- بہتر رفتار بمقابلہ ٹارک خصوصیات
- اعلی متحرک ردعمل
- اعلی کارکردگی
- بجلی اور رگڑ کے نقصانات کی کمی کی وجہ سے طویل آپریٹنگ زندگی
- شور مچانے والا آپریشن
- تیز رفتار کی حدود
درخواستیں:
برش لیس ڈی سی موٹر کی قیمت میں کمی آئی ہے کیونکہ اس کی پیشکش کے بعد سے مواد اور ڈیزائن میں پیشرفت ہوئی ہے۔ لاگت میں یہ کمی ، برش ڈی سی موٹر سے زیادہ متعدد فوکل پوائنٹس کے ساتھ مل کر ، برش لیس ڈی سی موٹر کو متعدد مخصوص ایپلی کیشنز میں ایک مقبول جزو بنا دیتا ہے۔ وہ درخواستیں جو بی ایل ڈی سی موٹر کو استعمال کرتی ہیں ان میں شامل ہیں ، لیکن ابھی تک ان پر پابندی نہیں ہے۔
- صارفین کے لیے برقی آلات
- ٹرانسپورٹ
- حرارت اور وینٹیلیشن
- انڈسٹریل انجینئرنگ
- ماڈل انجینئرنگ
کام کرنے کا اصول
بی ایل ڈی سی موٹرز کے کام کرنے کے اصول برش شدہ ڈی سی موٹر کی طرح ہی ہیں ، یعنی داخلی شافٹ پوزیشن آراء۔ برش شدہ ڈی سی موٹر کی صورت میں ، مکینیکل کمیوٹر اور برش کا استعمال کرتے ہوئے رائے لاگو کیا جاتا ہے۔ بی ایل ڈی سی موٹر کے اندر ، یہ ایک سے زیادہ آراء کے سینسر کا استعمال کرتے ہوئے حاصل کیا جاتا ہے۔ بی ایل ڈی سی موٹرز میں ہم زیادہ تر ہال اثر سینسر کا استعمال کرتے ہیں ، جب بھی روٹر مقناطیسی کھمبے ہال سینسر کے قریب سے گزرتے ہیں تو ، وہ ایک HIGH یا LOW-سطح کا سگنل تیار کرتے ہیں ، جو شافٹ کی پوزیشن کا تعین کرنے کے لئے استعمال کیا جاسکتا ہے۔ اگر مقناطیسی فیلڈ کی سمت تبدیل ہوجاتی ہے تو ، تیار شدہ وولٹیج بھی الٹ ہوجائے گی۔
بی ایل ڈی سی موٹر کو کنٹرول کرنا
مائکرو الیکٹرانک کے ذریعہ کنٹرول یونٹ لاگو کیا جاتا ہے اس کے کئی ہائی ٹیک انتخاب ہیں۔ یہ مائیکرو کنٹرولر ، ایک سرشار مائکرو کنٹرولر ، ایک سخت وائرڈ مائکرو الیکٹرانک یونٹ ، پی ایل سی ، یا اسی طرح کی کسی دوسری اکائی کا استعمال کرتے ہوئے نافذ کیا جاسکتا ہے۔
ینالاگ کنٹرولر اب بھی استعمال کر رہا ہے ، لیکن رائے کے پیغامات پر کارروائی نہیں کرسکتی ہے اور اس کے مطابق کنٹرول نہیں ہوسکتا ہے۔ اس قسم کے کنٹرول سرکٹس کے ذریعہ ، اعلی کارکردگی پر قابو پانے والے الگورتھم ، جیسے ویکٹر کنٹرول ، فیلڈ پر مبنی کنٹرول ، تیز رفتار کنٹرول کو نافذ کرنا ممکن ہے جو ان سب کا تعلق موٹر کی برقناطیسی حالت سے ہے۔ مزید برآں بیرونی لوپ کنٹرول مختلف حرکیات کی ضروریات جیسے سلائڈنگ موٹر کنٹرولز ، انکولیٹو کنٹرول ، پیش گوئی کنٹرول… وغیرہ کو روایتی طور پر بھی لاگو کیا جاتا ہے۔
ان سب کے علاوہ ، ہمیں اعلی کارکردگی والی PIC (پاور انٹیگریٹڈ سرکٹ) ، ASIC (ایپلیکیشن مخصوص انٹیگریٹڈ سرکٹس) وغیرہ ملتے ہیں۔ جو کنٹرول اور پاور الیکٹرانک یونٹ دونوں کی تعمیر کو بہت آسان بنا سکتا ہے۔ مثال کے طور پر ، آج ہمارے پاس ایک واحد آایسی میں پی ڈبلیو ایم (پلس کی چوڑائی ماڈلن) ریگولیٹر ہے جو کچھ سسٹمز میں پورے کنٹرول یونٹ کو تبدیل کرسکتا ہے۔ کمپاؤنڈ ڈرائیور آئی سی تینوں فیز کنورٹر میں تمام چھ پاور سوئچ چلانے کا مکمل حل فراہم کرسکتا ہے۔ اس میں متعدد اسی طرح کے مربوط سرکٹس ہیں جن میں دن بدن مزید اضافہ ہوتا جارہا ہے۔ دن کے اختتام پر ، سسٹم اسمبلی میں ممکنہ طور پر صرف ایک سافٹ ویئر سافٹ ویئر شامل ہوگا جس میں تمام ہارڈ ویئر صحیح شکل اور شکل میں آئیں گے۔
پی ڈبلیو ایم (پلس کی چوڑائی ماڈلن) لہر موٹر کی رفتار کو کنٹرول کرنے کے ل used استعمال کی جاسکتی ہے۔ یہاں اوسط وولٹیج دی جاتی ہے یا موٹر کی رفتار کو کنٹرول کرنے والی دالوں کے آن اور آف وقت کے حساب سے موٹر سے بہتا ہوا اوسطا موجودہ بدل جاتا ہے یعنی لہر کا ڈیوٹی سائیکل اپنی رفتار کو کنٹرول کرتا ہے۔ ڈیوٹی سائیکل (وقت کے مطابق) کو تبدیل کرنے پر ، ہم رفتار کو تبدیل کرسکتے ہیں۔ آؤٹ پٹ بندرگاہوں کا تبادلہ کرکے ، یہ موٹر کی سمت کو مؤثر طریقے سے بدل دے گا۔
سپیڈ کنٹرول
موٹر کو مطلوبہ شرح پر کام کرنے کے لئے بی ایل ڈی سی موٹر کا اسپیڈ کنٹرول ضروری ہے۔ ان پٹ ڈی سی وولٹیج کو کنٹرول کرکے برش لیس ڈی سی موٹر کی رفتار کو کنٹرول کیا جاسکتا ہے۔ وولٹیج جتنی زیادہ ہوگی اس کی رفتار بھی اتنی ہی زیادہ ہے۔ جب موٹر معمول کے موڈ میں کام کرتا ہے یا درجہ بندی کی رفتار سے نیچے چلتا ہے تو ، پی ڈبلیو ایم ماڈل کے ذریعہ آرمیچر کا ان پٹ وولٹیج تبدیل ہوجاتا ہے۔ جب کسی موٹر کو ریٹیڈ رفتار سے اوپر چلادیا جاتا ہے تو ، موجودہ روانی کو آگے بڑھانے کے ذریعہ بہاؤ کمزور ہوجاتا ہے۔
اسپیڈ کنٹرول بند لوپ یا اوپن لوپ اسپیڈ کنٹرول ہوسکتا ہے۔
اوپن لوپ اسپیڈ کنٹرول۔ اس میں موٹر ٹرمینلز پر صرف ڈی سی وولٹیج کاٹ کر ڈی سی وولٹیج کو کنٹرول کرنا شامل ہے۔ تاہم ، اس کے نتیجے میں کچھ حد تک حالیہ پابندی عائد ہے۔
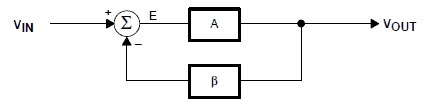
بند لوپ اسپیڈ کنٹرول - اس میں موٹر سے آنے والی رفتار کی آراء کے ذریعہ ان پٹ سپلائی وولٹیج کو کنٹرول کرنا شامل ہے۔ اس طرح سپلائی وولٹیج غلطی سگنل پر منحصر ہے۔
بند لوپ اسپیڈ کنٹرول تین بنیادی اجزاء پر مشتمل ہے۔
- مطلوبہ پی ڈبلیو ایم دالیں تیار کرنے کے لئے ایک پی ڈبلیو ایم سرکٹ۔ یہ یا تو مائکروقابو کرنے والا یا ٹائمر آئی سی ہوسکتا ہے۔
- اصل موٹر کی رفتار کو سمجھنے کے لئے ایک سینسنگ ڈیوائس۔ یہ ہال اثر سینسر ، ایک اورکت سینسر ، یا آپٹیکل انکوڈر ہوسکتا ہے۔
- موٹر آپریشن کو کنٹرول کرنے کے لئے ایک موٹر ڈرائیو۔
خرابی سگنل کی بنیاد پر سپلائی وولٹیج کو تبدیل کرنے کی یہ تکنیک یا تو pid کو کنٹرول کرنے والی تکنیک کے ذریعہ ہوسکتی ہے یا فجی منطق کا استعمال کرتے ہوئے۔
برش لیس ڈی سی موٹر کے اسپیڈ کنٹرول کیلئے درخواست

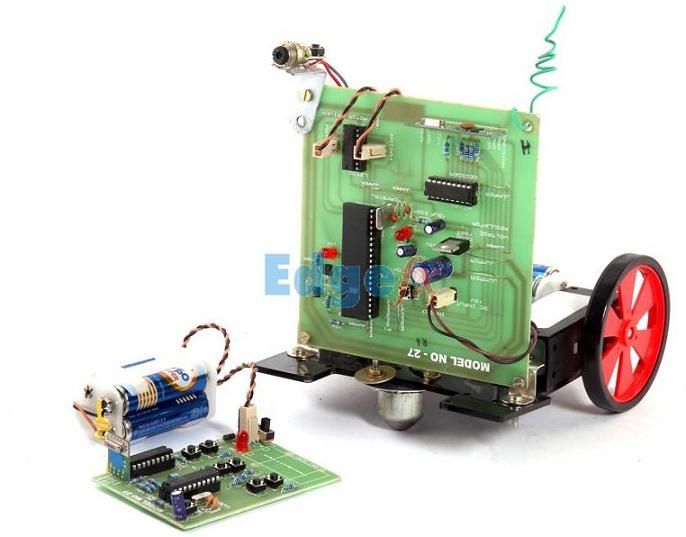
بی ایل ڈی سی ڈی سی موٹر کنٹرول
موٹر آپریٹنگ ایک آپٹکوپلر اور MOSFET انتظامات کا استعمال کرتے ہوئے کنٹرول کیا جاتا ہے ، جہاں مائکروکانٹرولر سے PWM تکنیک کے ذریعہ ان پٹ ڈی سی پاور کو کنٹرول کیا جاتا ہے۔ جیسے جیسے موٹر گھومتی ہے ، اس کے شافٹ میں موجود اورکت کی قیادت والی شافٹ پر سفید جگہ کی موجودگی کی وجہ سے سفید روشنی سے روشن ہوجاتا ہے اور اورکت روشنی کی عکاسی ہوتی ہے۔ فوٹوڈیوڈ اس اورکت روشنی کو حاصل کرتا ہے اور اس کی مزاحمت میں تبدیلی کرتا ہے ، اس طرح منسلک ٹرانجسٹر میں سپلائی وولٹیج میں تبدیلی کا باعث بنتا ہے اور مائکروقابو کو ایک پلس دی جاتی ہے تاکہ یہ فی منٹ گھومنے کی تعداد پیدا کرے۔ یہ رفتار LCD پر ظاہر ہوتی ہے۔
مطلوبہ رفتار مائکرو قابو کرنے والے کو انٹرفیس کیپیڈ میں داخل کی گئی ہے۔ سینسڈ اسپیڈ اور مطلوبہ رفتار کے مابین فرق خرابی کا سگنل ہے اور مائکروکانٹرولر غلطی سگنل کے مطابق پی ڈبلیو ایم سگنل تیار کرتا ہے ، موٹر کو ڈی سی پاور ان پٹ دینے کے لئے مبہم منطق کی بنیاد پر۔
اس طرح بند لوپ کنٹرول کا استعمال کرتے ہوئے ، برش لیس ڈی سی موٹر کی رفتار کو کنٹرول کیا جاسکتا ہے اور اسے کسی بھی مطلوبہ رفتار سے گھومنے کے لئے بنایا جاسکتا ہے۔
فوٹو کریڈٹ:







{kind=link}