اس پوسٹ میں ہم ایک سادہ 3 فیز انڈکشن موٹر اسپیڈ کنٹرولر سرکٹ بنانے پر تبادلہ خیال کرتے ہیں ، جسے کسی ایک مرحلے میں شامل موٹر یا لفظی طور پر کسی بھی قسم کی AC موٹر کے لئے بھی لاگو کیا جاسکتا ہے۔
جب یہ بات آتی ہے شامل کرنے والی موٹروں کی رفتار کو کنٹرول کرنا عام طور پر میٹرکس کنورٹرز ملازمت میں ہوتے ہیں ، جس میں بہت سے پیچیدہ مراحل شامل ہوتے ہیں جیسے LC فلٹرز ، دو طرفہ سوئچز (IGBTs کا استعمال کرتے ہوئے) وغیرہ۔
یہ سب آخر میں ایک کٹے ہوئے AC سگنل کے حصول کے لئے لگائے جاتے ہیں جس کے ڈیوٹی سائیکل کو ایک پیچیدہ مائکروکونٹرولر سرکٹ کا استعمال کرتے ہوئے ایڈجسٹ کیا جاسکتا ہے ، آخر کار مطلوبہ موٹر اسپیڈ کنٹرول فراہم کرتا ہے۔
تاہم ہم تجربہ کرسکتے ہیں اور جدید صفر کراسنگ ڈیٹیکٹر آپٹو کپلر آئی سی ، پاور ٹرائیک اور پی ڈبلیو ایم سرکٹ کا استعمال کرتے ہوئے ایک انتہائی آسان تصور کے ذریعے 3 مرحلہ انڈکشن موٹر اسپیڈ کنٹرول کو پورا کرنے کی کوشش کر سکتے ہیں۔
زیرو کراسنگ ڈٹیکٹر آپٹو جوڑے کا استعمال کرتے ہوئے
آپٹکوپلرز کے ایم او سی سیریز کا شکریہ جس نے ٹرائک کنٹرول سرکٹس کو انتہائی محفوظ اور تشکیل کرنے میں آسان بنا دیا ہے ، اور مطلوبہ کنٹرولز کیلئے پریشانی سے پاک PWM انضمام کی اجازت دی ہے۔
اپنی ایک سابقہ پوسٹ میں میں نے ایک سادہ سی گفتگو کی PWM نرم آغاز موٹر کنٹرولر سرکٹ جس نے منسلک موٹر پر موثر نرم آغاز فراہم کرنے کے لئے MOC3063 IC نافذ کیا۔
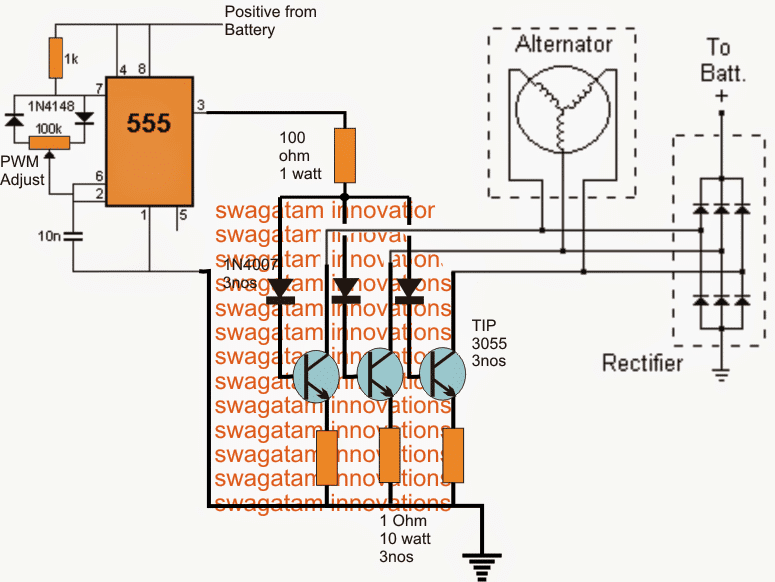
یہاں بھی ہم مجوزہ 3 فیز انڈکشن موٹر اسپیڈ کنٹرولر سرکٹ کو نافذ کرنے کے لئے یکساں طریقہ استعمال کرتے ہیں ، مندرجہ ذیل تصویر میں بتایا گیا ہے کہ یہ کیسے ہوسکتا ہے:
اعداد و شمار میں ہم تین یکساں MOC آپٹو کپلر مرحلے کو دیکھ سکتے ہیں جو ان کے معیاری ٹرائیک ریگولیٹر وضع میں تشکیل دیا گیا ہے ، اور ان پٹ ضمنی ایک کے ساتھ مربوط ہے سادہ آئی سی 555 پی ڈبلیو ایم سرکٹ .
3 ایم او سی سرکٹس 3 فیز اے سی ان پٹ کو سنبھالنے اور اسی کو منسلک انڈکشن موٹر تک پہنچانے کے ل config تشکیل دیا گیا ہے۔
آپٹو کے الگ تھلگ ایل ای ڈی کنٹرول سائیڈ میں پی ڈبلیو ایم ان پٹ 3 فیز اے سی ان پٹ کے کاٹنے کا تناسب طے کرتا ہے جس پر ایم او سی آئی سی ایس پروسیس کررہا ہے۔
آئی سی 555 پی ڈبلیو ایم کنٹرولر (زیرو وولٹیج سوئچنگ) کا استعمال کرتے ہوئے
اس کا مطلب ہے ، ایڈجسٹ کرکے 555 آایسی کے ساتھ منسلک PWM برتن ایک موثر انداز میں شامل کرنے والی موٹر کی رفتار کو کنٹرول کرسکتا ہے۔
اس کے پن # 3 میں آؤٹ پٹ مختلف ڈیوٹی سائیکل کے ساتھ آتی ہے جس کے نتیجے میں آؤٹ پٹ ٹرائیچ سوئچ ہوجاتا ہے ، جس کے نتیجے میں یا تو AC RMS ویلیو میں اضافہ ہوتا ہے یا اسی کی کمی واقع ہوتی ہے۔
وسیع پیمانے پر پی ڈبلیو ایم کے ذریعہ آر ایم ایس میں اضافہ موٹر پر تیز رفتار حاصل کرنے کے قابل بناتا ہے ، جبکہ پی آر ڈبلیو ایم کے ذریعہ اے سی آر ایم ایس کو کم کرنا ایک برعکس اثر پیدا کرتا ہے ، یہی وجہ ہے کہ موٹر متناسب سست ہوجاتا ہے۔
مذکورہ بالا خصوصیات کو بہت زیادہ درستگی اور حفاظت کے ساتھ نافذ کیا گیا ہے کیونکہ آئی سی کو بہت سی داخلی نفیس خصوصیات دی گئی ہیں ، خاص طور پر اس کے لئے ڈرائیونگ کی آزمائش اور بھاری نفع بخش بوجھ جیسے انڈکشن موٹرز ، سولینائڈز ، والوز ، کنیکٹر ، ٹھوس اسٹیٹ ریلے وغیرہ۔
آایسی بھی ڈی سی مرحلے کے لئے بالکل الگ تھلگ آپریشن کو یقینی بناتا ہے جو صارف کو بجلی کے جھٹکے کے خوف کے بغیر ایڈجسٹمنٹ کرنے کی سہولت دیتا ہے۔
سنگل مرحلے کی موٹر اسپیڈ کو کنٹرول کرنے کے ل The اصول کو موثر طریقے سے استعمال کیا جاسکتا ہے ، 3 کے بجائے ایک ہی MOC آایسی کو ملازمت دے کر۔
ڈیزائن اصل میں مبنی ہے وقت متناسب triac ڈرائیو نظریہ. اوپری آئی سی 555 پی ڈبلیو ایم سرکٹ 50 فیصد ڈیوٹی سائیکل پیدا کرنے کے ل adj ایڈجسٹ کیا جاسکتا ہے جبکہ زیادہ تعدد پر ، جبکہ پی او ایم سرکٹ کو متعلقہ برتن کی ایڈجسٹمنٹ کے ذریعہ انڈکشن موٹر کے اسپیڈ کنٹرول آپریشن کو نافذ کرنے کے لئے استعمال کیا جاسکتا ہے۔
اس 555 آایسی کی سفارش کی جاتی ہے کہ اوپری آای سی 555 سرکٹ سے نسبتا frequency کم تعدد ہو۔ یہ پن # 6/2 کیپسیسیٹر کو تقریبا 100nF تک بڑھا کر کیا جاسکتا ہے۔

نوٹ: فیز وائرس کے ساتھ سیرئز میں مناسب انڈیکیٹرز کو شامل کرنا تیز رفتار کنٹرول سسٹم کی کارکردگی کو بڑھاوا سکتا ہے۔
مذکورہ بالا تصور کو استعمال کرکے وایوفارم اور فیز کنٹرول فرض کیا گیا ہے۔

3 مرحلہ انڈکشن موٹر کو کنٹرول کرنے کا مذکورہ بالا طریقہ دراصل اس سے کافی خام ہے کوئی وی / ہرٹز کنٹرول نہیں ہے .
موٹر پر اوسط طاقت پیدا کرنے اور اس اوسط AC کو موٹر میں ردوبدل کرکے رفتار پر قابو پانے کے ل It ، یہ آسانی سے مختلف نرخوں پر مینز کو آن / آف سوئچنگ میں ملازمت کرتا ہے۔
ذرا ذرا تصور کریں کہ کیا آپ 40 منٹ یا 50 بار فی منٹ دستی طور پر موٹر آن / آف کرتے ہیں۔ اس کے نتیجے میں آپ کی موٹر کچھ نسبتا اوسط قدر کی طرف آؤٹ ہوجائے گی ، پھر بھی مستقل حرکت میں ہوگی۔ مندرجہ بالا اصول اسی طرح کام کرتا ہے۔
ایک زیادہ تکنیکی نقطہ نظر ایک سرکٹ ڈیزائن کرنا ہے جو V / ہرٹج تناسب پر مناسب کنٹرول کو یقینی بناتا ہے اور پرچی کی رفتار یا کسی بھی وولٹیج اتار چڑھاؤ کے لحاظ سے خود بخود اسی طرح ایڈجسٹ ہوجاتا ہے۔
اس کے لئے ہم بنیادی طور پر درج ذیل مراحل کو ملازمت کرتے ہیں۔
- H-Bridge یا مکمل برج IGBT ڈرائیور سرکٹ
- مکمل برج سرکٹ کو کھانا کھلانے کے لئے 3 مرحلہ جنریٹر کا مرحلہ
- V / ہرٹج PWM پروسیسر
فل برج IGBT کنٹرول سرکٹ کا استعمال کرنا
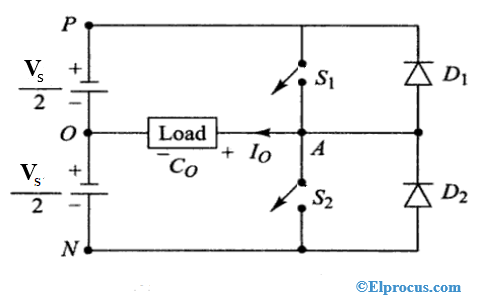
اگر مذکورہ بالا ٹرائیک پر مبنی ڈیزائن کے طریقہ کار ترتیب دینے کا عمل آپ کو مشکل لگتا ہے تو ، مندرجہ ذیل مکمل پل پل PWM پر مبنی انڈکشن موٹر اسپیڈ کنٹرول کی کوشش کی جاسکتی ہے۔

مذکورہ بالا اعداد و شمار میں دکھائے گئے سرکٹ میں ایک چپ مکمل پل ڈرائیور استعمال ہوا ہے آئی سی آئی آر ایس 2330 (جدید ترین ورژن 6EDL04I06NT ہے) جس میں محفوظ اور کامل 3 مرحلے کے موٹر آپریشن کو مطمئن کرنے کے لئے اندر موجود تمام خصوصیات موجود ہیں۔
آئی سی کو مطلوبہ 3 مرحلے آسکیلیٹنگ آؤٹ پٹ پیدا کرنے کے ل its اپنے HIN / LIN پن آؤٹ میں صرف ایک مطابقت پذیر 3 فیز لاجک ان پٹ کی ضرورت ہوتی ہے ، جو آخر کار مکمل برج IGBT نیٹ ورک اور منسلک 3 فیز موٹر کو چلانے کے لئے استعمال ہوتا ہے۔
رفتار کنٹرول PWM انجکشن ہمارے پچھلے ڈیزائنوں میں دیکھایا گیا ہے ، جیسے کہ ایک آئی سی 555 پی ڈبلیو ایم جنریٹر کے ایس پی ڈبلیو ایم فیڈ کے ذریعہ کنٹرول کردہ ، 3 علیحدہ آدھے پل این پی این / پی این پی ڈرائیور مراحل کے ذریعے نافذ کیا جاتا ہے۔ یہ PWM سطح بالآخر انڈکشن موٹر کی رفتار کو کنٹرول کرنے کے لئے استعمال کی جاسکتی ہے۔
اس سے پہلے کہ ہم انڈکشن موٹر کے لئے اسپیڈ کنٹرول کا اصل طریقہ سیکھیں ، چلیں پہلے یہ سمجھیں کہ خودکار کیسے ہے V / ہرٹج کنٹرول جیسا کہ ذیل میں تبادلہ خیال کیا گیا ہے ، کچھ آئی سی 555 سرکٹس کا استعمال کرتے ہوئے حاصل کیا جاسکتا ہے
خودکار V / ہرٹج PWM پروسیسر سرکٹ (بند لوپ)
مذکورہ بالا حصوں میں ہم نے وہ ڈیزائن سیکھ لئے جو انڈکشن موٹر کو کارخانہ دار کے ذریعہ متعین کردہ نرخ پر منتقل کرنے میں مدد فراہم کریں گے ، لیکن یہ مستقل وی / ہرٹز تناسب کے مطابق ایڈجسٹ نہیں ہوگا جب تک کہ مندرجہ ذیل پی ڈبلیو ایم پروسیسر کو ایچ کے ساتھ مربوط نہ کیا جائے۔ برج PWM ان پٹ فیڈ۔

مندرجہ بالا سرکٹ ایک آسان ہے آئی سی 555 کے ایک جوڑے کا استعمال کرتے ہوئے پی ڈبلیو ایم جنریٹر . آئی سی 1 پی ڈبلیو ایم تعدد پیدا کرتا ہے جو R4 / C3 کی مدد سے IC2 کے پن # 6 پر مثلث لہروں میں تبدیل ہوتا ہے۔
ان مثلث کی لہروں کا موازنہ IC2 کے پن # 5 میں سائنو لہر کے ساتھ کیا جاتا ہے۔ یہ نمونے کی لہریں 3 فیز اے سی مینوں کو 12 وی اے سی لہر میں اصلاح کرکے حاصل کی جاتی ہیں اور مطلوبہ پروسیسنگ کے لئے آئی سی 2 کے 5 # پن کو کھلایا جاتا ہے۔
دو ویوفارم کا موازنہ کرکے ، ایک مناسب جہت والا SPWM تیار کیا جاتا ہے آئی سی 2 کے پن نمبر 3 پر ، جو H-Bridge نیٹ ورک کے لئے ڈرائیونگ PWM بن جاتا ہے۔
وی / ہرٹز سرکٹ کس طرح کام کرتا ہے
جب پن # 5 پر کیپسیٹر پر پاور سوئچ ہوتی ہے تو پن # 5 پر صفر وولٹیج پیش کرکے شروع ہوتا ہے جس کی وجہ سے ایس پی ڈبلیو ایم کی سب سے کم قیمت ہوتی ہے ایچ پل سرکٹ ، جس کے نتیجے میں انڈکشن موٹر آہستہ آہستہ نرم آغاز کے ساتھ شروع ہوجاتی ہے۔
جیسا کہ یہ کیپسیٹر چارج کرتا ہے ، پن # 5 میں ممکنہ صلاحیت بڑھ جاتی ہے جو تناسب سے ایس پی ڈبلیو ایم میں اضافہ کرتی ہے اور موٹر کو آہستہ آہستہ رفتار حاصل کرنے کے قابل بناتی ہے۔
ہم ایک ٹیکومیٹر فیڈ بیک سرکٹ بھی دیکھ سکتے ہیں جو IC2 کے پن # 5 کے ساتھ بھی مربوط ہے۔
یہ ٹیکومیٹر روٹر اسپیڈ یا پرچی کی رفتار پر نظر رکھتا ہے اور آئی سی 2 کے پن # 5 پر اضافی وولٹیج تیار کرتا ہے۔
اب جیسے جیسے موٹر کی رفتار میں اضافہ ہوتا ہے پرچی کی رفتار اسٹیٹر فریکوئنسی کے ساتھ ہم آہنگ ہونے کی کوشش کرتی ہے اور اس عمل میں یہ رفتار حاصل کرنا شروع کردیتا ہے۔
شامل کرنے کی پرچی میں یہ اضافی تناسب سے ٹیکومیٹر وولٹیج میں اضافہ ہوتا ہے جس کے نتیجے میں آئی سی 2 میں اضافہ ہوتا ہے SPWM آؤٹ پٹ اور اس کے نتیجے میں موٹر کی رفتار میں مزید اضافہ ہوتا ہے۔
مذکورہ بالا ایڈجسٹمنٹ V / ہرٹز تناسب کو کافی حد تک مستقل طور پر برقرار رکھنے کی کوشش کرتا ہے جب تک کہ آخر میں جب آئی سی 2 سے ایس پی ڈبلیو ایم مزید کوئی اضافہ نہیں کرسکتی ہے۔
اس وقت پرچی کی رفتار اور اسٹیٹر کی رفتار مستحکم حالت حاصل کرتی ہے اور یہ اس وقت تک برقرار رہتا ہے جب تک کہ ان پٹ وولٹیج یا پرچی کی رفتار (بوجھ کی وجہ سے) کو تبدیل نہیں کیا جاتا ہے۔ اگر ان میں تبدیلی کی جاتی ہے تو V / Hz پروسیسر سرکٹ ایک بار پھر عمل میں آجاتا ہے اور انڈکشن موٹر کی تیز رفتار کے زیادہ سے زیادہ ردعمل کو برقرار رکھنے کے لئے تناسب کو ایڈجسٹ کرنا شروع کردیتا ہے۔
ٹیکومیٹر
ٹیکومیٹر سرکٹ مندرجہ ذیل آسان سرکٹ کا استعمال کرتے ہوئے بھی سستے سے تعمیر کیا جاسکتا ہے اور مذکورہ بالا وضاحت شدہ سرکٹ مراحل کے ساتھ مربوط ہے:

اسپیڈ کنٹرول کو کیسے نافذ کریں
مندرجہ بالا پیراگراف میں ہم خود کار طریقے سے ریگولیشن کے عمل کو سمجھ گئے ہیں جو ایک کو ضم کر کے حاصل کرسکتے ہیں ٹیکومیٹر کی رائے ایک آٹو ریگولیٹنگ SPWM کنٹرولر سرکٹ میں۔
اب آئیے سیکھیں کہ تعدد کو مختلف کرتے ہوئے کس طرح انڈکشن موٹر کی رفتار کو کنٹرول کیا جاسکتا ہے ، جو بالآخر ایس پی ڈبلیو ایم کو درست V / ہرٹج تناسب کو چھوڑنے اور برقرار رکھنے پر مجبور کرے گا۔
مندرجہ ذیل آریھ اسپیڈ کنٹرول کنٹرول مرحلے کی وضاحت کرتا ہے:

یہاں ہم 340 مرحلے کا جنریٹر سرکٹ دیکھ سکتے ہیں جس کا استعمال آئی سی 4035 کر رہا ہے جس کے مرحلہ شفٹ فریکوینسی میں اس کے پن # 6 پر گھڑی کے ان پٹ کو مختلف کرکے مختلف کیا جاسکتا ہے۔
مطلوبہ HIN تیار کرنے کے لئے 4049 IC دروازوں پر 3 مرحلے کے اشارے لگائے جاتے ہیں ، مکمل برج ڈرائیور نیٹ ورک کیلئے لن فیڈز۔
اس سے یہ ظاہر ہوتا ہے کہ آئی سی 4035 کی گھڑی کی فریکوئینسی میں مناسب طور پر مختلف ہو کر ، ہم موثر انداز میں انڈکشن موٹر کی آپریٹنگ 3 فیز فریکوئنسی کو مؤثر طریقے سے تبدیل کرسکتے ہیں۔
یہ ایک سادہ آئی سی 555 حیرت انگیز سرکٹ کے ذریعہ لاگو کیا جاتا ہے جو آئی سی 4035 کے پن نمبر 6 پر ایڈجسٹ فریکوئنسی کو کھاتا ہے ، اور 10000 برتن کے ذریعے تعدد ایڈجسٹ کرنے کی اجازت دیتا ہے۔ کاپاکیٹر سی کو اس طرح کا حساب لگانے کی ضرورت ہے کہ ایڈجسٹ فریکوئینسی رینج منسلک انڈکشن موٹر کی صحیح تصریح میں آئے۔
جب فریکوئینسی برتن مختلف ہوتا ہے تو ، انڈکشن موٹر کی موثر تعدد بھی تبدیل ہوجاتی ہے ، جو اسی طرح موٹر کی رفتار کو تبدیل کرتی ہے۔
مثال کے طور پر جب تعدد کم ہوجاتا ہے تو ، موٹر کی رفتار کو کم کرنے کا سبب بنتا ہے ، جس کے نتیجے میں ٹیکومیٹر آؤٹ پٹ وولٹیج کو تناسب سے کم کرنے کا سبب بنتا ہے۔
ٹیکومیٹر آؤٹ پٹ میں یہ متناسب کمی ایس پی ڈبلیو ایم کو تنگ کرنے پر مجبور کرتی ہے اور اس طرح متناسب طور پر موٹر تک وولٹیج آؤٹ پٹ کو نیچے کھینچتی ہے۔
اس عمل کے نتیجے میں یہ یقینی بناتا ہے کہ تعدد کنٹرول کے ذریعہ انڈکشن موٹر کی رفتار کو کنٹرول کرتے ہوئے V / Hz تناسب برقرار رہتا ہے۔
انتباہ: مذکورہ بالا تصور صرف نظریاتی مفروضوں پر ڈیزائن کیا گیا ہے ، براہ کرم احتیاط کے ساتھ آگے بڑھیں۔
اگر آپ کو اس 3 فیز انڈکشن موٹر اسپیڈ کنٹرولر ڈیزائن کے بارے میں مزید کوئی شکوک ہے تو ، آپ کو اپنے تبصرے کے ذریعہ پوسٹ کرنے کا آپ کا خیرمقدم ہے۔
پچھلا: ایک بلاتعطل بجلی کی فراہمی (UPS) سرکٹ کا ڈیزائن کیسے کریں اگلا: آئی سی 555 کے ساتھ دو متبادل بوجھ کو آن / آف تبدیل کرنا



![وایمنڈلیی پریشر انڈیکیٹر سرکٹ [ایل ای ڈی بیرومیٹر سرکٹ]](https://electronics.jf-parede.pt/img/3-phase-power/40/atmospheric-pressure-indicator-circuit-led-barometer-circuit-1.jpg)